Логи Blackbox (блэкбокс или черный ящик) очень полезны для диагностики распространенных проблем с квадрокоптером. По этой причине мы рекомендуем активировать черный ящик хотя бы для первых полетов на новой прошивке или после сборки.
В этой статье рассмотрим работу с логами Blackbox в вопросе различных проблем и покажем, как их расшифровывать.
Сбой или неисправность гироскопа
Симптомы: у квадрокоптера вибрации или прерывистые «рывки», когда дрон ускоряется.
Пример логов (журнала) Blackbox:

Расшифровка: сбой гироскопа отображается на графике как пики по всему журналу. Полетный контроллер общается с гироскопом и он ему сообщает примерно следующее (глазами контроллера):
- каждые несколько секунд квадрокоптер вращается по оси рыскания (yaw), а затем резко останавливается.
На самом деле ничего такого не происходит и это прямой признак неисправности гироскопа, который сообщает полетному контроллеру ложные данные. Во время медленно полета или зависания в воздухе — на графике не должно быть никаких пик.
Как исправить: замена контроллера полета. Если у вас есть донор запчастей, то можете заменить его.
Неправильная калибровка ESC (регуляторов оборотов)
Симптомы: квадрокоптер странно ведет себя на высоких оборотах и на холостом ходу.
Пример логов (журнала) Blackbox:
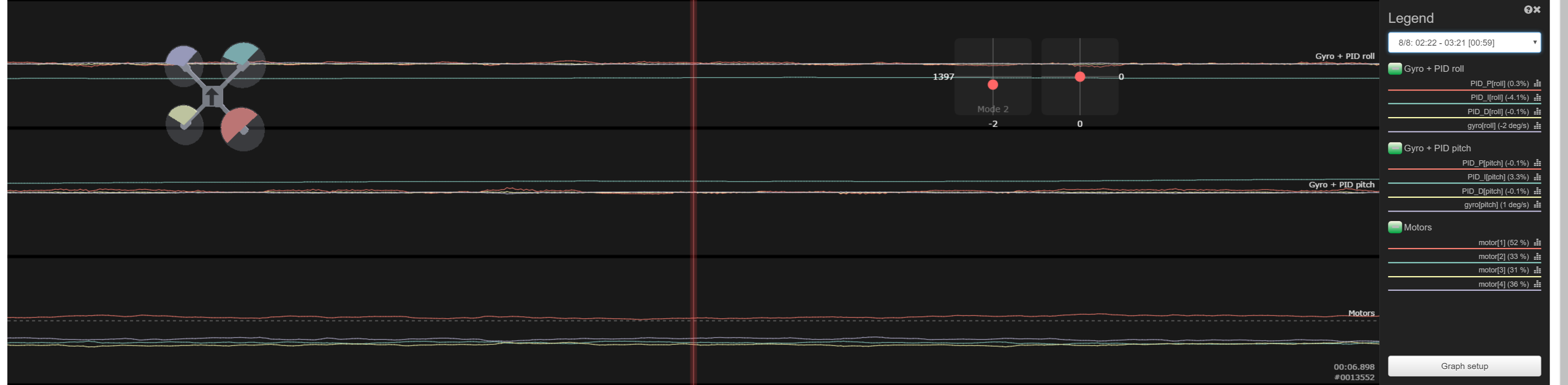
Расшифровка: посмотрите на график моторов внизу скриншота Blackbox Explorer (низ-лево, Motor). Обратите внимание, что все двигатели, кроме двигателя 1, установлены на ~ 33% мощности, в то время как двигатель 1 на 52% мощности. Такая картина на всем графике даже во время зависания в воздухе. При зависании, все линии должны быть примерно на одном уровне.
Как исправить: нужно проверить калибровку регулятора оборотов этого двигателя. Для этого зайдите в BLHeli и убедитесь, что у всех регуляторов ползунки расположены в одинаковых положениях. Если все равномерно, но двигатель все равно по графику выше остальных, значит он неисправен, либо неисправен сам регулятор оборотов и их нужно заменить.
Проблемы с аппаратурой управления
Симптомы: двигатели медленно вращаются до определенного момента — пока вы не доведете стик, например, до полного газа. Ситуация, когда вы только заармили дрон и он еще на земле.
Квадрокоптер дрифтует и проваливается в полете.
Пример логов (журнала) Blackbox:
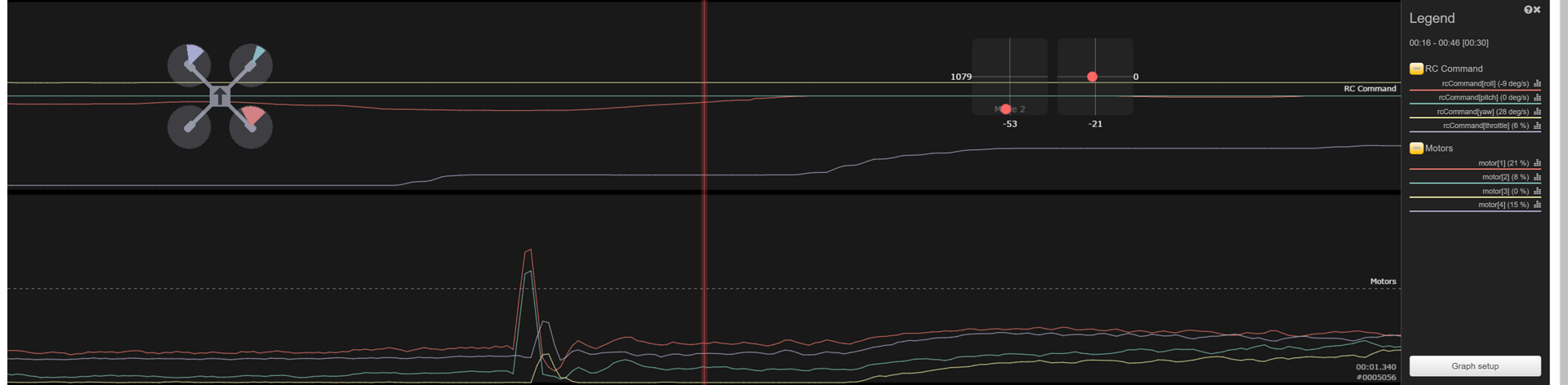
Расшифровка: посмотрите на график RC Command. Строчка rcCommand(yaw) постоянно находится выше других и приводит к постоянному рысканию 28° в секунду. То, что rcCommand(yaw) находится выше — это прямая проблема механизма стика или предела чувствительности стика или обрезки стиков (это кнопки под стиками).
Как исправить: Подключите дрон к компьютеру, запустите Betaflight и перейдите на вкладку Receiver. Все значения верхних 3 стиков должны быть на отметке 1500. Если это не так, вам нужно с помощью кнопок обрезки (под стиком и около стика справа или слева есть кнопки), отрегулировать значение так, чтобы цифра стала 1500.
Если значение колеблется в небольших пределах, то нужно увеличить зону нечувствительности. Подробнее читайте Betaflight configurator, настройка на русском, либо спрашивайте в комментариях.
Неправильные настройки PID
Вам не нужно быть экспертом, чтобы увидеть в логах Blackbox проблемы с PID. Чрезмерное усиление любой оси в PID сразу можно увидеть на графиках.
Чрезмерное усиление P Gain
Симптомы: квадрокоптер трясется после крутых поворотов или переворотов.
Пример логов (журнала) Blackbox:
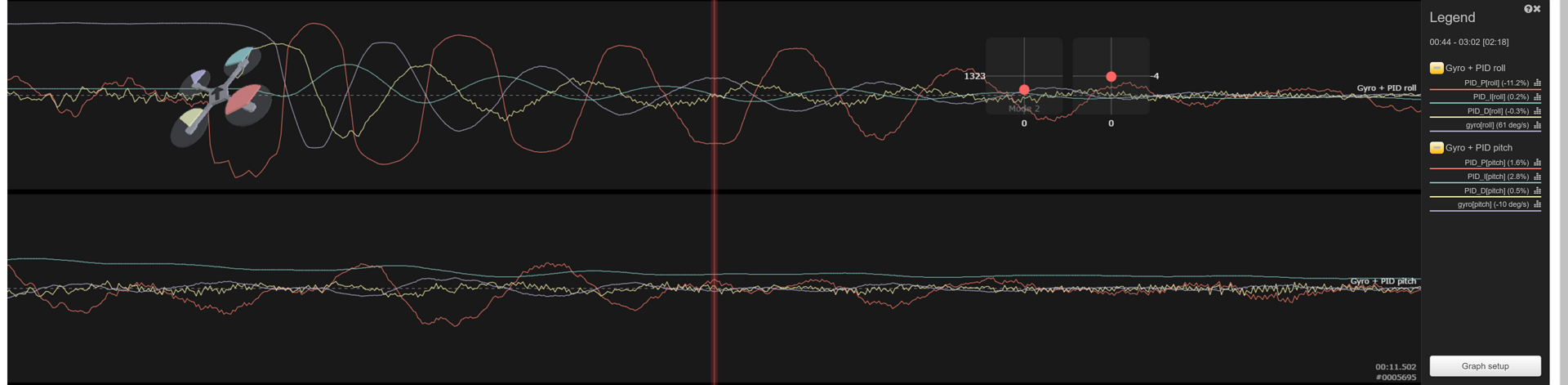
Расшифровка: смотрим на график Gyro + PID. В этот момент пилот делал фигуру бочка, и после прекращения (пилот больше не делает крен/roll), график еще продолжает колебаться. На графике мы видим много волнообразных колебаний после резких маневров — это все из-за сильного усиления P Gain!
Как исправить: уменьшите коэффициент усиления P Gain на несколько пунктов. Рекомендуется уменьшить сначала на 0.5 по оси ROLL (крен). Если у вас на графике показывается только 2-3 колебания, то можно попробовать увеличить усиление D Gain по оси ROLL на несколько пунктов.
Чрезмерное увеличение D Gain
Симптомы: у квадрокоптера высокочастотная вибрация после крутых поворотов или переворотов. Моторы и регуляторы оборотов ESC сильно греются.
Пример логов (журнала) Blackbox:

Расшифровка: смотрим на график Gyro + PID. Линии P и D колеблются — они как бы сражаются друг с другом. Это приводит к тому, что на двигатели постоянно поступают разные значения от газа и этим самым вызываются высокочастотные вибрации в гироскопе. В общем, при сильном усилении D, эффективность P сильно снижается и происходит то, что мы видим на скриншоте.
Как исправить: самое простое решение — снизить усиление. Если вы уже запутались, то проще перепрошить дрон и оставить настройки D Gain по умолчанию.
Проблемы с шумом и фильтрацией
Симптомы: высокочастотные вибрации в полете. Вибрация на холостом ходу на земле — пропеллеры с двигателями создают вибрацию. Двигатели и ESC горячие после полета.
Пример логов (журнала) Blackbox:

Расшифровка: смотрим на линию PID_D. Видим, что линия нечеткая и есть пики. Также видим, что эти колебания приводят к появлению шума на двигателях (график под этим графиком), а значит это приводит к вибрации в полете, а уже из-за вибрации будут греться двигатели. Таких графиков не должно быть ни на каких линиях — то есть. не должно быть вот таких мелких колебаний на линиях. Если они есть, то нужно настраивать параметр LPF и Notch Filter.
Как исправить: увеличьте значение фильтра dterm_lowpass в разделе «Filters» на вкладке «PID Tuning» с шагом в 10 пунктов, пока шум не исчезнет.
