
SPI_RX новый протокол связи, который используется между контроллером полета и приемником по SPI BUS.
Оригинал статьи: https://oscarliang.com
У SPI_RX есть преимущества над, например, SBUS, об этом мы и поговорим в этой статье.
Что такое SPI_RX?
Впервые мы узнали о новом протоколе при общении с разработчиками Betaflight и Matek, примерно в начале 2017 года, т.е. сравнительно недавно. Сейчас, компания Matek выпускает полетный контроллер F411-ONE, он идет сразу с встроенным приемником, который уже работает по протоколу SPI_RX.
SPI_RX никак не относится к FPort, это другой протокол RX, который разрабатывается специалистами Frsky и Betaflight.
SPI — это протокол связи, похожий на UART, протокол последовательной связи. Для подключения SPI требуется 4 провода, в то время как соединение UART использует только 2 (TX и RX). Однако SPI быстрее, чем UART, и снижает нагрузку на процессор.
Использование SPI BUS в полетных контроллерах не является чем-то новым, потому что такие датчики как гироскоп, SD-карты, компас и так далее уже давно работают в режиме интеграции в плату полетного контроллера.
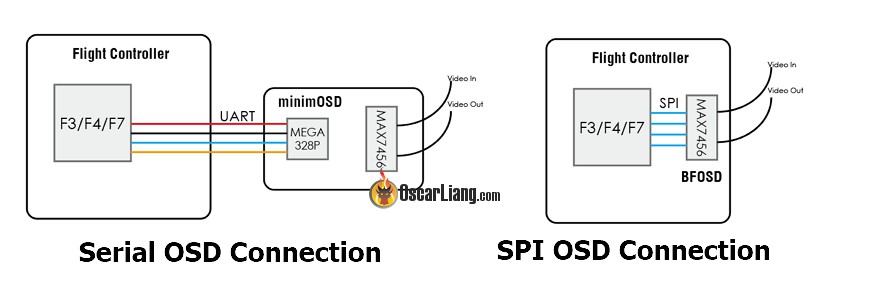
Мы «обновили» OSD от использования UART до использования SPI для использования OSD Betaflight. Если вы используете MinimOSD, то прекрасно понимаете, насколько удобно использовать Betaflight OSD, чем обычное, использую последовательное соединение:
- Betaflight OSD не принимает UART
- Betaflight OSD быстрее обновляет данные, поскольку SPI быстрее, чем последовательное соединение, также полетный контроллер (MCU) подключается непосредственно к микросхеме OSD без необходимости подключения через другой MCU в OSD (например, MEGA328P к MinimOSD)
- Отсутствие сбоев из-за проводки и самих проводов, потому что OSD уже встроено в полетный контроллер.

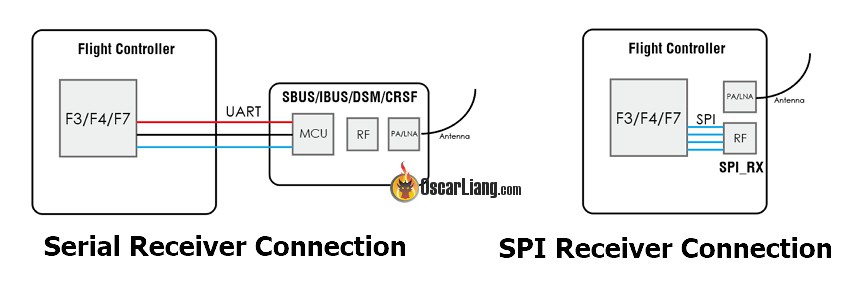
Приемники, использующие SPI BUS, имеют схожие преимущества, и я думаю, что весь смысл SPI_RX состоит в том, чтобы приемник был интегрирован в FC.
Протоколы последовательного приема, такие как SBUS, IBUS, Spektrum DSM и TBS Crossfire, требуют отдельного MCU на приемнике в качестве интерфейса для общения с контроллером полета по UART.
Новый режим «SPI_RX» будет добавлен в Betaflight Configurator версии 3.3. Подробнее о Betaflight Configurator.
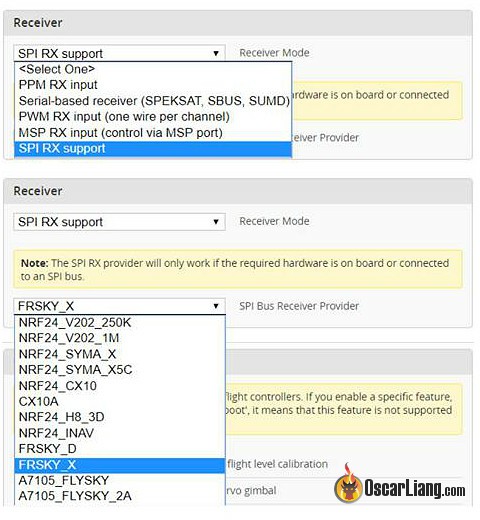
Для тех, у кого Taranis и Horus, вам нужно будет выбрать протоколы Frsky_X (16 каналов) и Frsky_D (8 каналов).
Преимущества SPI_RX:
-
SPI_RX поддерживает Телеметрию и настройку PID по телеметрии (как настраивать PID)
-
SPI_RX освобождает два UART порта, заменив SBUS и SmartPort или, по крайней мере, 1 UART, заменив CRSF, iBUS или DSM
-
По словам Андрея Миронова, разработчика Betaflight, задержка должна быть ниже, чем у SBUS (в теории)
- Приемники, использующие SPI_RX, могут быть встроены в полетные контроллеры, а стоимость должна быть ниже, чем отдельные приемники
- Больше не нужны провода для соединения полетного контроллера с приемником
- «Привязать» приемник можно программно, либо по-старинке, замыканием определенных двух контактов
- Интегрированный в протокол RSSI, больше нет нужны использовать дополнительный канал
Пока еще неподтвержденные слова:
Каждый раз, когда вы будете прошивать полетный контроллер с протоколом SPI_RX, вам придется заново привязывать приемник к пульту. Betaflight работают над тем, чтобы была функция сохранения информации о привязке для будущих прошивок.