Здравствуйте, хочу собрать коптер для съёмок, нашёл видео там контроллер дорогой, хочу найти дешевле. Вопрос: любой контроллер для квадрокоптеров подойдёт на большой квадрокоптер для съёмок? Каждый рассчитан на определённые esc или на любой контроллер можно повесить любое esc?
Приложение
Как установить приложение на iOS
Смотрите видео ниже, чтобы узнать, как установить наш сайт в качестве веб-приложения на домашнем экране.
Примечание: Эта возможность может быть недоступна в некоторых браузерах.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нём некорректно.
Вам необходимо обновить браузер или попробовать использовать другой.
Вам необходимо обновить браузер или попробовать использовать другой.
Вопрос
- Автор темы Alotio
- Дата начала
Сделаю на раме 450 и что значит дальность? Сделать хотел на этом или если он совсем плохой можно подороже
 m.banggood.com
m.banggood.com
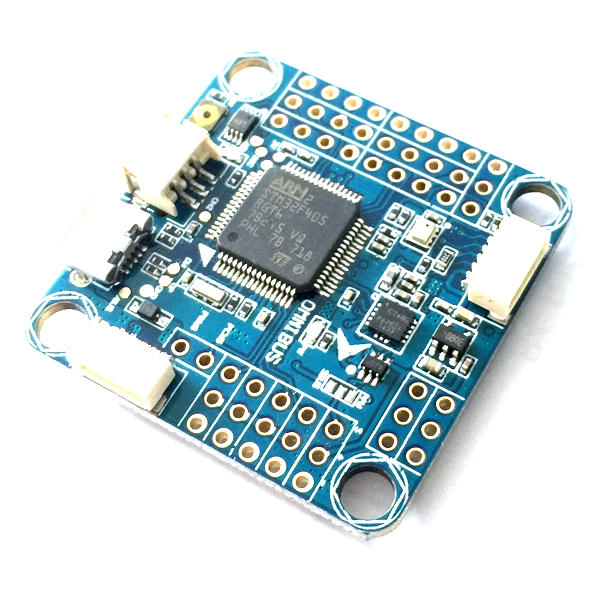
[1 524,09 руб. 17% OFF] Omnibus F4SD 32K Betaflight_3.2.0 STM32 Контроллер полетов F405 OSD 5V 3A BEC 30,5X30,5 мм RC запчасти from Игрушки Хобби и Робот on banggood.com
Omnibus F4SD 32K Betaflight_3.2.0 Контроллер полетов OSD 5V 3A BEC STM32 F405 30.5X30.5мм
qzz
Эксперт
- Регистрация
- 14 Фев 2021
- Сообщения
- 493
- Реакции
- 143
Здравствуйте. Теоретически любой полётный контроллер (ПК) от "гоночного"\"фристайлового" квадрокоптера подойдёт для большого дрона. Единственное, нужно обращать внимание на количество поддерживаемых моторов и допустимое напряжение питания ПК, они чаще всего рассчитаны под 6s и 4s батареи (макс. 25в и 17в соответственно). Но можно и этот момент проигнорировать, судя по всему у вас будут одиночные ESC на каждый мотор, и как следствие - плата распределения питания, на которой можно предусмотреть понижайку для питания ПК.
Клон омнибаса по ссылке выше сильно морально устаревший, конечно, но в то же время довольно удачный - есть слот под SD карту, а значит можно писать логи в неограниченном количестве и стабилизировать отснятые материалы в Gyroflow.
Клон омнибаса по ссылке выше сильно морально устаревший, конечно, но в то же время довольно удачный - есть слот под SD карту, а значит можно писать логи в неограниченном количестве и стабилизировать отснятые материалы в Gyroflow.
Подключаю ESC к полётному контроллеру matek f405-te. Подскажите, от esc 2 толстых провода это понятно куда подключать, а также идут 3 тонких провода, земля, сигнал, +5V. Земля и сигнал понял куда подключать. Вопрос заключается надо ли этот +5V от esc подключать к одному из контактов +5v данном контроллера и если нет то для чего данный провод?
Вложения


- Регистрация
- 26 Дек 2017
- Сообщения
- 331
- Реакции
- 43
Подключаю ESC к полётному контроллеру matek f405-te. Подскажите, от esc 2 толстых провода это понятно куда подключать, а также идут 3 тонких провода, земля, сигнал, +5V. Земля и сигнал понял куда подключать. Вопрос заключается надо ли этот +5V от esc подключать к одному из контактов +5v данном контроллера и если нет то для чего данный провод?
Это у вас BEC (Battery eliminator circuit) под красным проводом:
это дополнительная часть регулятора, которая способна передавать питание от батареи к другим элементам устройства, таким как сервоприводы и полетные контроллеры.
Здравствуйте!
Очень прошу помощи в настройке первого моего дрона.
Пока столкнулся с проблемой настройки esc.
Полетный контроллер matek f 405 te, регуляторы- прикреплю фото. Прошивка в inav.
При настройке работы в протоколе дшот600 не крутит один мотор из четырех (так же на дшот300 и 1500). На "стандарт" крутят все моторы.
Блхели32 не может прочитать конфигурацию esc.
Хелп ми!!
Очень прошу помощи в настройке первого моего дрона.
Пока столкнулся с проблемой настройки esc.
Полетный контроллер matek f 405 te, регуляторы- прикреплю фото. Прошивка в inav.
При настройке работы в протоколе дшот600 не крутит один мотор из четырех (так же на дшот300 и 1500). На "стандарт" крутят все моторы.
Блхели32 не может прочитать конфигурацию esc.
Хелп ми!!
Вложения

по идее черный это - управления и должен звониться с - питанияЗдравствуйте, Подскажи пожалуйста. Раньше на управление контролера делали три провода: + - и управление. А счас два белый и чёрный, как подсоединить/к чему эти два провода. Спасибо.
а белый это само управление
проверь тестером