
Режим «GPS Rescue» в Betaflight аналогичен режиму «Возврат домой». Когда вы теряете радио сигнал или видео, квадрокоптер должен вернуться домой по GPS.
Но не ожидайте, что ваш дрон будет возвращаться также, как флагман DJI, нет, но точность возврата будет достаточно хорошая, чтобы была возможность вернуть в работу радио и видео сигналы. Это полезная функция в Betaflight, которая спасет ваш дрон, особенно, если вы летаете на дальние дистанции.
Перевод: https://oscarliang.com
Требования к режиму GPS Rescue
- Обновите полетный контроллер до версии прошивки Betaflight 3.5 и новее;
- Настройте модуль GPS.
Барометр не требуется, но рекомендуется. Компас не нужен, так как в этом режиме не используется. У ПК Kakute F7 есть встроенный барометр.
Настройка GPS Rescue
Как только вы установите GPS-модуль, вам останется только настроить программное обеспечение. Все настройки производятся конкретно под ваш дрон и вашей местности.
Обязательно прочитайте полную информацию по этой функции: https://github.com/betaflight/betaflight/wiki/GPS-rescue-mode
Запустите Betaflight и перейдите в командную строку CLI. Затем введите команду «get gps» и вам загрузится список параметров. Теперь мы рассмотрим настройки, которые я поменял для своего квадрокоптера.

set gps_rescue_min_sats = 6
Ваш дрон не будет работать, если модуль «поймал» меньше спутников, чем указано в этом параметре. Вы можете установить меньшее число или даже 0, если не хотите ждать, пока модуль «поймает» спутники.
Обратите внимание, если вы взлетите до момента, пока модуль не нашел нужное количество спутников, он не будет знать, где дом и забиндит точку возврата там, где поймает 6 спутников и больше.
Рекомендуется ставить число от 6 до 8.
set gps_rescue_angle = 45
Это градусы. Означает, на какой градус отклонится дрон, если будет лететь против ветра. По умолчанию стоит 30°. Но, если угол будет слишком большой, а двигатели слабые, то дрон может упасть.
set gps_rescue_descent_dist = 100
Значение в метрах. Расстояние от дома, на котором дрон начнет снижение. Введите то значение, которое по вашему мнению обеспечит восстановление радио и видео связи с дроном.
set gps_rescue_initial_alt = 50
Значение в метрах. Означает, на какой высоте дрон будет лететь домой. Выберите такую высоту, чтобы дрон не задел деревья, линии электропередач и прочие препятствия, но чтобы его было слышно или видно (как летит).
set gps_rescue_ground_speed = 1000
Сантиметры в секунду. Скорость, с которой квадрокоптер будет возвращаться домой. Я считаю, что 2000см/сек слишком быстро и выставил значение 1000см, это примерно 36км/ч.
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
Некоторые пилоты могут случайно выключить моторы в режиме возврата домой. Эта функция проверяет дрон на то, работают ли двигатели. Если функция возврат домой не используется, то двигатели можно отключить, но если потеряна связь, то двигатели не отключить, пока дрон не прилетит на максимально близкое расстояние для восстановления связи. Не рекомендуется отключать эту функцию.
Активация функции GPS Rescue
Есть 2 способа активации функции GPS спасения: активация с помощью функции Failsafe и активация по тумблеру в ручном режиме. Я рекомендую сначала настроить на активацию по тумблеру для тестирования, вдруг не сработает.
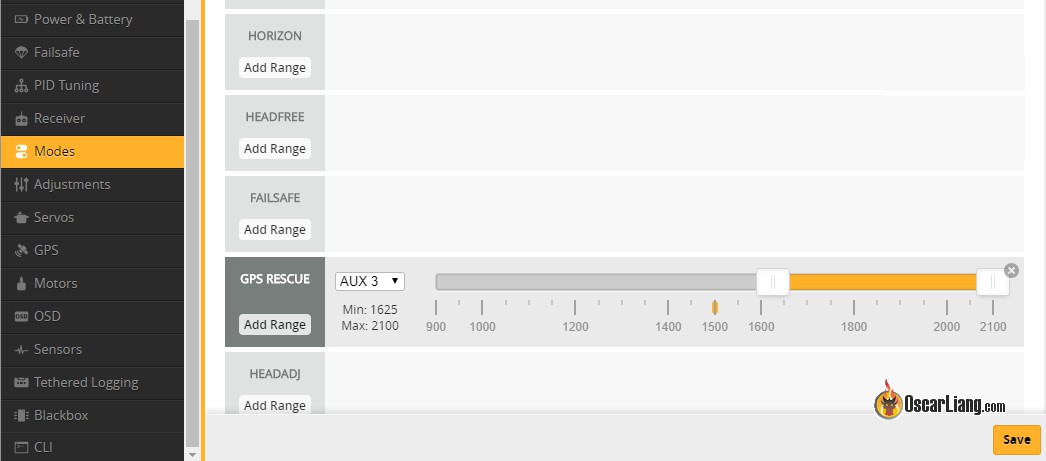
Запустите Betaflight и перейдите во вкладку Modes и добавьте переключатель/AUX для функции GPS Rescue.
Тестирование режима GPS Rescue
Снимите пропеллеры. Убедитесь, что режим GPS возврата активируется после переключения тумблера и отключается при включении режима ACRO.
Не забудьте, что настройки зависят от вашего дрона и местности, лучше всего тестировать функцию в открытом поле без людей и препятствий.
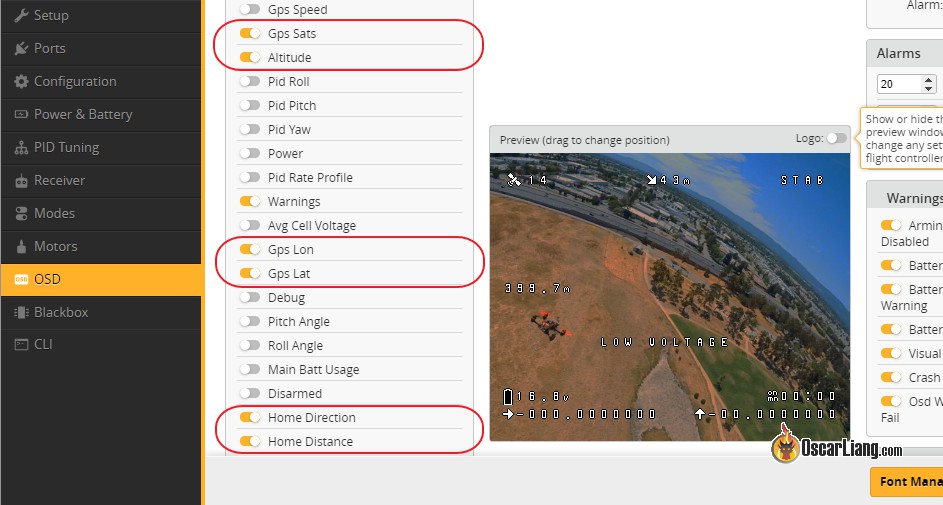
Вы можете добавить эти элементы OSD на экран шлема/очков для контроля:
Летайте по прямой. Например, если вы установили возврат домой на высоте 100 метров, то поднимитесь выше, до 150 метров и активируйте функцию.
Обратите внимание на «домашнюю» стрелку в OSD, важно, чтобы она точно указывала на «дом». Если стрелка указывает не туда, значит что-то пошло не так и функцию активировать нельзя, так как дрон полетит в направлении стрелки.
Использование GPS_Rescue в Failsafe
Как только вы убедитесь, что все работает стабильно, можно настроить функцию GPS Rescue для срабатывания автоматически в режиме Failsafe.
Для активации функции, в командной строке CLI введите:
set failsafe_procedure = GPS-RESCUE
save
Обратите внимание, что функция GPS Rescue будет включаться в момент потери сигнала и отключаться тогда, когда связь восстановится, при этом будет включен режим ACRO.
Что происходит после активации режима Rescue Mode (возврат домой)?
Смотря на какой высоте в этот момент будет ваш дрон — он либо наберет заданную высоту, либо сделает снижение до этой высоты, затем он делает крен и начинает лететь в сторону «дома», после чего идет на снижение.
* — Реклама. ООО «ЯНДЕКС», ИНН 7736207543, erid: 5jtCeReNx12oajt54cs8okg

Забиндил на aux gos rescue, включаю в полете — дрон тупо отключает движки и падает..
Спутников ловит достаточно
Там в прошивке заложено определенная дистанция до дрона, если дрон ближе — то будет то, что вы написали. Если улететь дальше дистанции, то все нормально должно быть.