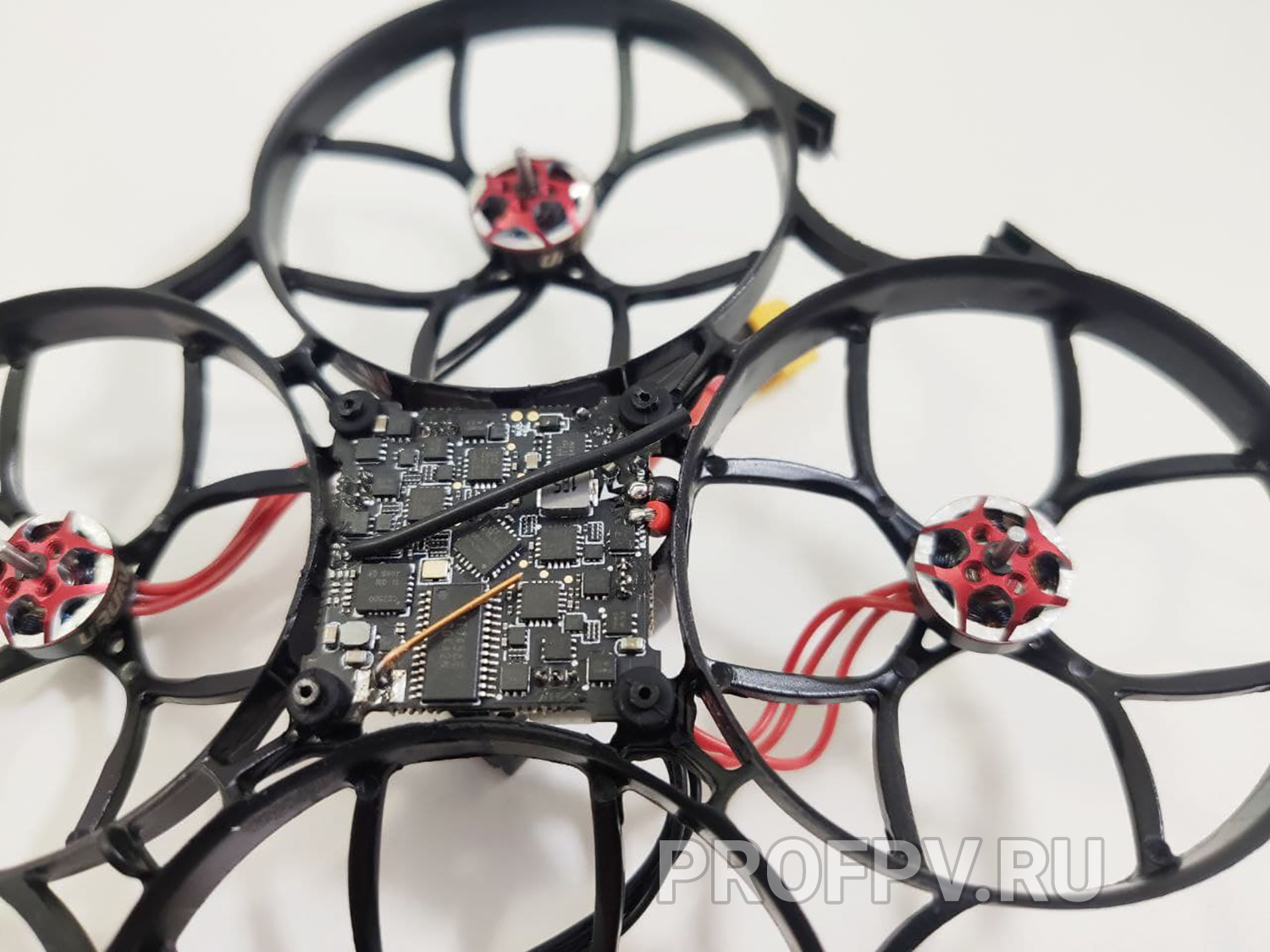
URUAV UZ85 — это микро квадрокоптер или TinyWhoop от бренда URUAV. Размер дрона составляет 85 мм, а питание происходит от аккумулятора 2S. В статье рассмотрим внешний вид, сборку и настройку, а также видео полета.
Технические характеристики
- Размер рамы: 85 мм;
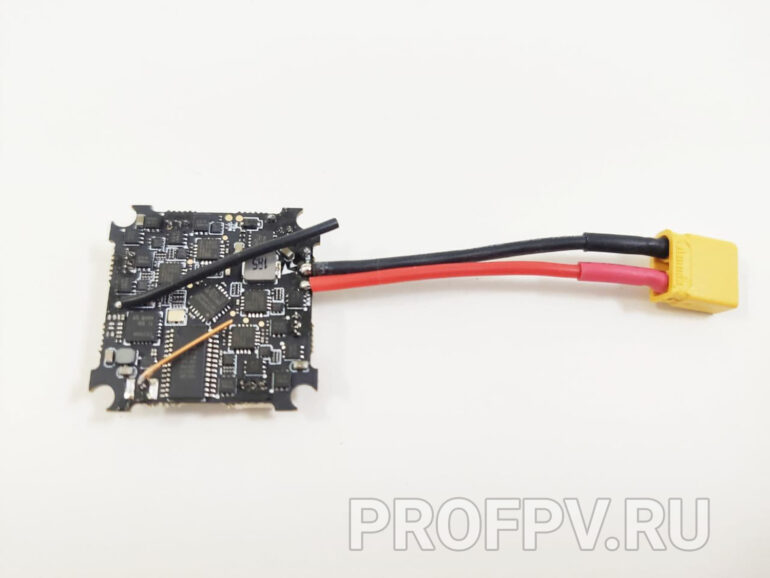
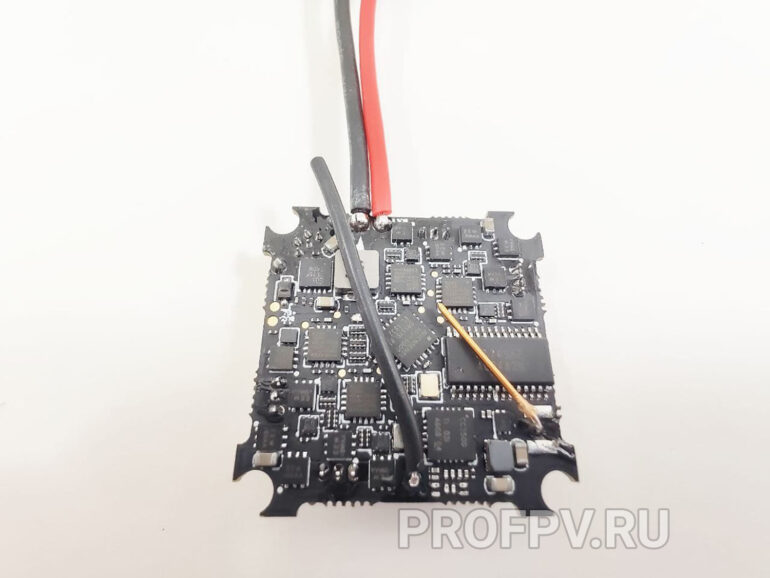
- Полетный контроллер: CRAZYBEEX F411;
- Двигатели: URUAV 1102 10000KV;
- Пропеллеры: 3-лопастные, 2.3 дюйма;
- ESC: встроенные регуляторы, 4 в 1 на процессоре EFM8BB21;
- Приемник: встроенные FrSky или FlySky (или без приемника);
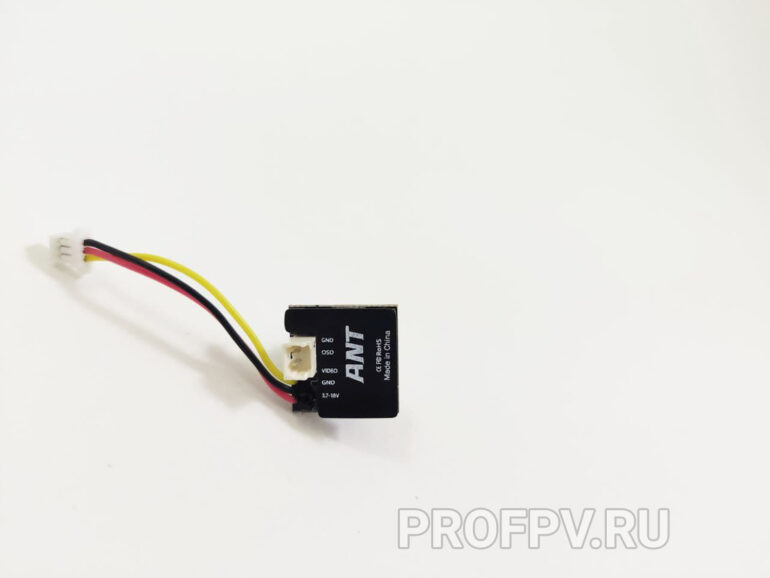
- Видеопередатчик: встроенный, мощностью 25-200 mW;
- FPV камера: Caddx ANT lite 1200TVL;
- Аккумулятор: 2S 300mAh/350mAh/450mAh/520mAh;
- Вес: 36 грамм без аккумулятора;
- Общие размеры: 115 мм * 115 мм * 45 мм.
Обзор URUAV UZ85
Дрон был заказан в магазине Яндекс.Маркет* в самом начале релиза, но видимо не повезло с транспортировкой или был брак, версия FrSky не хотела соединяться с моей аппаратурой. Написал в тех.поддержку, объяснил, показал фото, сказали, что отправят новую плату. FrSky в наличии не было почему-то, поэтому взял FlySky, так как у меня мультипротокольная аппаратура. Было потеряно время, но обзор все равно получился.
URUAV UZ85 — это дрон класса TinyWhoop.
TinyWhoop — это микро квадрокоптер у которого размеры составляют в среднем 80-120 мм (общая ширина/длина), а вес не превышает 35-50 грамм. Дроны созданы для преимущественных полетов в помещении.
Комплект и сборка UZ85
Квадрокоптер приходит в разобранном виде, отдельными частями. Сама сборка простая и не требует пайки, нужно будет только отвертка:

Что в комплекте:
- Рама;
- 4 двигателя;
- 4 пропеллера;
- Пластиковый кожух с креплением для камеры;
- Камера;
- 4 виброподушки;
- Набор винтов;
- Полетный контроллер;
- Плата управления видеопередатчиком.
Отвертки под М1.3-1.4 нет, позаботьтесь о ее наличии заранее.
Шаг 1. Сборка начинается с того, что прикручиваются двигатели к раме. Винты я посадил на фиксатор резьбы, нужен синий, но я посадил на красный, чтобы крепче было.

Двигатели прикручиваются самыми короткими винтами, М1.3х3! Пакетики с ними лежат в пакете с двигателями.
Моторы крепятся по диагонали друг к другу.
Двигатели бесщеточные, а значит долговечные и с высоким КПД.
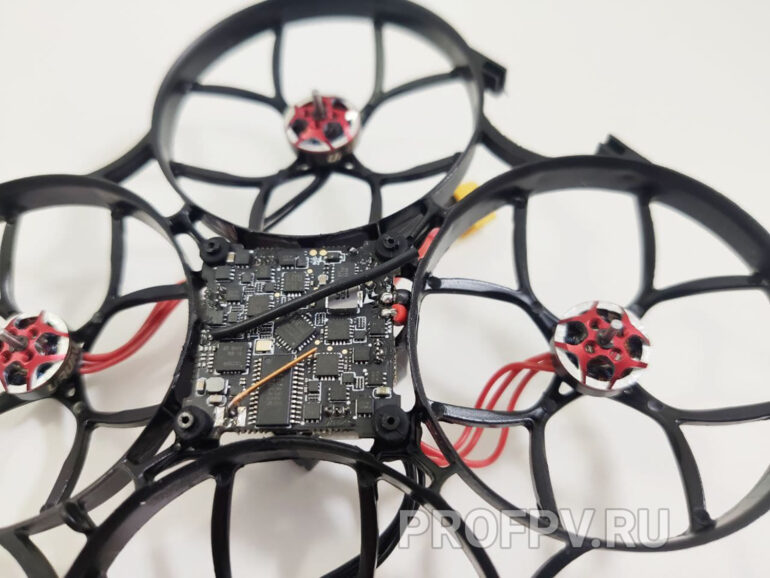
Шаг 2. Берем виброподушки и надеваем на уголки полетного контроллера и аккуратно надеть их на штырьки рамы.
При монтаже будет мешаться выход контактов питания, не бойтесь, это нормально, просто приложите немного усилий и эта часть впихнется. Почему не сделать вывод в углу или сделать раму чуть шире — остается загадкой:
Провод питания можно просунуть между двумя кольцами в этом месте, так будет проще, потом я сделал именно так:

Шаг 3. Подключаем контакты двигателей к контактам полетного контроллера:

Как видите на фото выше, контакты подключаются к ближайшим.
Шаг 4. Берем крепление для камеры и прикручиваем к кожуху. Затем вставляем камеру в кожух:

Контакт камеры присоединяем к оставшемуся контакту на полетном контроллере, он сбоку.
Остается прикрутить кожух с камерой на раму дрона.
На полетном контроллере есть стрелка с направлением, она указывает, где у дрона перед и куда он будет лететь. Именно в эту сторону должна смотреть камера.
Антенны лучше всего поместить в кожух так, чтобы они торчали из него, так будет меньше перекрытия сигнала.
Шаг 5. Остается установить пропеллеры. В комплекте идут винты для дополнительной фиксации, но они очень короткие и их просто не хватает. Сначала я решил использовать свои собственные винты, но в процессе установки понял, что пропеллеры очень туго насаживаются на вал двигателя и не нужны эти винты, все держится крепко. В общем, открутил их. В процессе полетов все подтвердилось, ничего не вылетает, так что винты можете не вкручивать.


Настройка URUAV UZ85
Дрон придет вам уже прошитый, сразу рекомендую сделать полный бекап в Betaflight командой DUMP в командной строке CLI. Только после этого можете ставить эксперименты, потому что слишком много сообщений бывает, что не сделал бекап, прошил, а настройки все слетели.
В Betaflight нужно выполнить только настройку аппаратуры управления после привязки.
Читайте также: Обзор Jumper T-Lite: компактная аппаратура управления
Привязка пульта управления к приемнику дрона URUAV UZ85:
- Создаем новую модель в аппаратуре управления;
- Переходим в ее настройки и включаем режим BIND. Я использую аппаратуру Jumper T-Lite на прошивке OpenTX, поэтому выбрал протокол FlySky2 и включил BIND. На аппаратуре FlySky, нужно зажать кнопку BIND и включить пульт.
- Включить режим привязки на квадрокоптере можно двумя способами, через командную строку и с помощью физической кнопки. Через командную строку надо ввести команду HELP, выведется список команд, найдите там команду с припиской BIND RX или BIND RECEIVER. Точную команду не пишу, потому что от версии прошивки она может меняться и у меня не совпала с инструкцией.
Я привязывал через кнопку: зажал кнопку пинцетом и подсоединил аккумулятор.
Привязка через команду: просто отправляем команду.
- Далее нужно ввести команду SAVE и перезагрузиться (если через кнопку делали, то просто отключаем и включаем питание).
- Идем в Betaflight в раздел Приемник и проверяем, что все работает. Подвигайте стиками и переключателями, при необходимости, выполните настройки в пульте.
- На этом настройка завершена.
Все остальное я оставил как есть, за исключением настроек в OSD, там убрал несколько лишних для меня отображений, например, прицел.
Аккумулятор для URUAV UZ85
Производитель рекомендует использовать аккумуляторы LiPo 2S 300mAh/350mAh/450mAh/520mAh, с разъемом XT30.
Я купил Tattu 2S 450 mAh 95C на Яндекс.Маркет*. Аккумуляторы очень хорошо себя показали во время полетов.

Не забудьте купить переходник с XT30 на XT60, чтобы заряжать их обычным зарядным устройством.
Я забыл и прошлось делать контакты самому.
FPV камера
Здесь ничего интересного, Caddx ANT lite 1200TVL это максимально простая и облегченная камера. Качество картинки среднее, прибавим к этому аналоговый видеопередатчик и получим обычную FPV картинку гоночного квадрокоптера! Скриншот с видео:

Первый полет
Полет на URUAV UZ85 почти ничем не отличается от полета на классическом гоночном квадрокоптере 220 мм за тем исключением, что на URUAV UZ85 можно летать где угодно, ведь он маленький.
Нужно будет экспериментировать с размещением провода антенны, так как в некоторых положениях сигнал сильно перебивается, а так летать можно на 100 метров точно без потери сигнала.
Видеопередатчик настроен на максимальную мощность, которая там есть (она одна) — 25 mW.
Видео полета
Здесь вы можете увидеть текущее потребление тока и уменьшение емкости аккумулятора. В целом у меня получалось летать минимум 7 минут, иногда до 10 минут про спокойных полетах. Если топить газ «в пол», то время должно составить 5-6 минут. Результаты меня устраивают!
Фотографии
















































Заключение

То, что производитель положил винты для крепления пропеллеров считаю недостатком, так как они короткие, но при этом нужды в них все равно нет.
Защита вокруг двигателей очень удачная, я конечно не врезался в стены и столбы, но на землю 2 раза упал - квадрокоптер URUAV UZ85 остался полностью целым, на пропеллерах никаких повреждений нет.
Управлять им легко, но это также зависит от вашей аппаратуры управления, как вы к ней привыкли и вообще от ваших навыков пилотирования. Первый раз пробуйте летать в режиме стабилизации, потому что дрон реально резвый и с непривычки можно потерять управление.
К покупке дрон рекомендую, учитывая низкую стоимость и поддержку 2S аккумуляторов!

У меня есть uz65 с одним дохлым мотором. Вот думаю что если взять раму с моторами от uz85 и по ресадить кишки туда. 1S совсем не нравится, и заряжать неудобно и летает 2-3 минуты всего.
Сгорит, так как не рассчитан на токи от 2S