
Что делать, если переворачивается квадрокоптер? Вы собрали и включили квадрокоптер, приготовились взлетать, но вместо взлета дрон перевернулся. Что делать в таком случае? В этой статье попытаемся помочь вам решить эту проблему.
В новой (последней) версии Betaflight добавлена новая функция — полетный контроллер будет запрещать взлет, если имеются какие-либо неполадки, которые он заметит, будто неоткалиброванный гироскоп или неисправный регулятор оборотов. Это очень крутая функция, которая обезопасит пилота и окружающих от возможных травм или другого ущерба. Если контроллер решит, что что-то не так, он не даст квадрокоптеру взлететь и на экране OSD появится надпись RUNAWAY. Все шаги по поиску проблемы и ее исправления одинаковы и будут описаны ниже.
Не важно, первый это у вас квадрокоптер или десятый — вы должны знать, что перед любыми проверками нового квадрокоптера проверять его следует без пропеллеров и уж тем более ремонтировать тоже без них!
Проверьте пропеллеры
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Убедитесь, что пропеллеры установлены в соответствии с этой схемой:
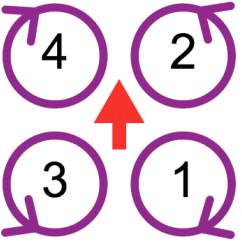
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
Обычно на пропеллерах указывается, где у него верх, а где низ, но если нет, то верхняя его кромка должна «цепляться» за воздух и толкать его вниз:
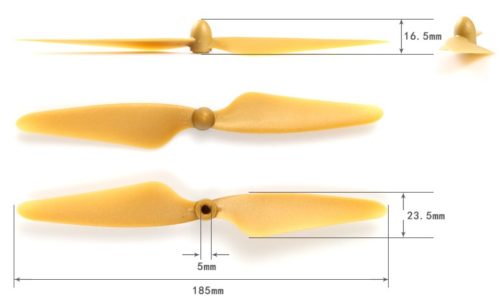
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Проверьте Turtle Mode
Turtle Mode — это режим черепахи. Работает он так: ваш дрон упал вверх ногами, вы включаете Turtle Mode и дрон включает двигатели в обратную сторону и переворачивает себя на «ноги». Выглядит это вот так:

Вам нужно убедиться, что вы случайно или преднамеренно не назначили одному и тому же переключателю две функции, например, арминг и черепаху на один переключатель. Для этого запустите Betaflight и перейдите в раздел Режимы (Modes).
Проверьте направление вращения двигателей
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
- перепаять провода
- зайти в BL_heli и сделать реверс.
Про перепаять — меняем местами плюс и минус, а с реверсом, читаем статью: https://profpv.ru/blheli-конфигуратор-для-прошивки-регулято/
Проверьте направление полетного контроллера
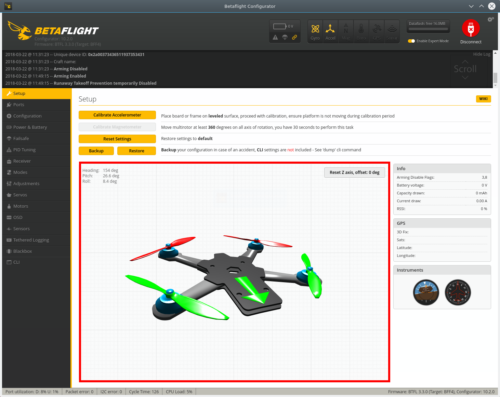
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление. Для этого перейдите во вкладку Configuration и найдите поле Board and Sensor Alignment. В поле вводятся градусы. Для определения того, сколько градусов прописать, воспользуйтесь транспортиром, ну или на глаз — к примеру, начните с 90°.
Откалибруйте акселерометр
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Проверьте схему двигателей (mixer)
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.
Обновите прошивку
В решении проблемы может помочь перепрошивка полетного контроллера и регуляторов оборотов. Для этого нужно сначала сделать бекап настроек. Бекап — это резервная копия. Как сделать бекап через CLI: https://profpv.ru/как-сделать-бекап-настроек-и-восстано/
Подробнее о Betaflight: https://profpv.ru/betaflight-настройка/
Механические проблемы
Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
Моторы и регуляторы оборотов
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.

От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Неисправный акселерометр
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер. Но перед этим попробуйте сначала его отключить во вкладке Configuration. Вы, конечно, не сможете летать в режиме стабилизации, но опытные пилоты в нем и не летают, только в АКРО.
Неисправный гироскоп
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Возможно, вам поможет статья: Не запускается квадрокоптер? Исправляем проблемы
Статья написана на основе.

У самого была проблема. Возможное решение:https://www.youtube.com/watch?v=QeuSq71pYF0
Хочу посоветоватся.Купил микро дрон Modula7.В режиме стабилизации летает без проблем,но как только переключаюсь в режим Акро,взлететь невозможно,дрон переворачивается вперед со смещением вправо.Пробовал треммировать,ни чего не изменилось.АппаратураFlaySkay i 6, bf конфигуратор последней версии,прошивка дрона заводская,не самая последняя. Вячеслав.
С modula больше всего проблем за последнее время. Напишите на форуме, может кто сталкивался с этим вопросом и поможет вам.
Единственное, что можно посоветовать для начала, это сделать бекап:
и перепрошить полетный контроллер на последнюю прошивку.