
Raceflight — новейшая прошивка для полётных контроллеров F4, что позволяет им работать на частоте 8kHz с временем цикла до 125 (uS).
Оригинал статьи: https://oscarliang.com
Я также расскажу о протоколе MultiShot для связи «полетный контроллер-регулятор оборотов», который работает в 10 раз быстрее протокола Oneshot125 и в 80 раз быстрее стандартного PWM-сигнала!
Что такое Raceflight
Прошивка Raceflight и протокол Multishot были представлены RS2K (пользователем RCGroups). RF (Raceflight) это ответвление BF (Betaflight), то есть для создания был использован оригинальный код BF, но был изменен под полетный контроллер F4.
Baseflight > Cleanflight > Betaflight > Raceflight
Что касается графического интерфейса, RF использует модифицированную версию конфигуратора Cleanflight (приложение Chrome) для прошивки и изменения настроек:
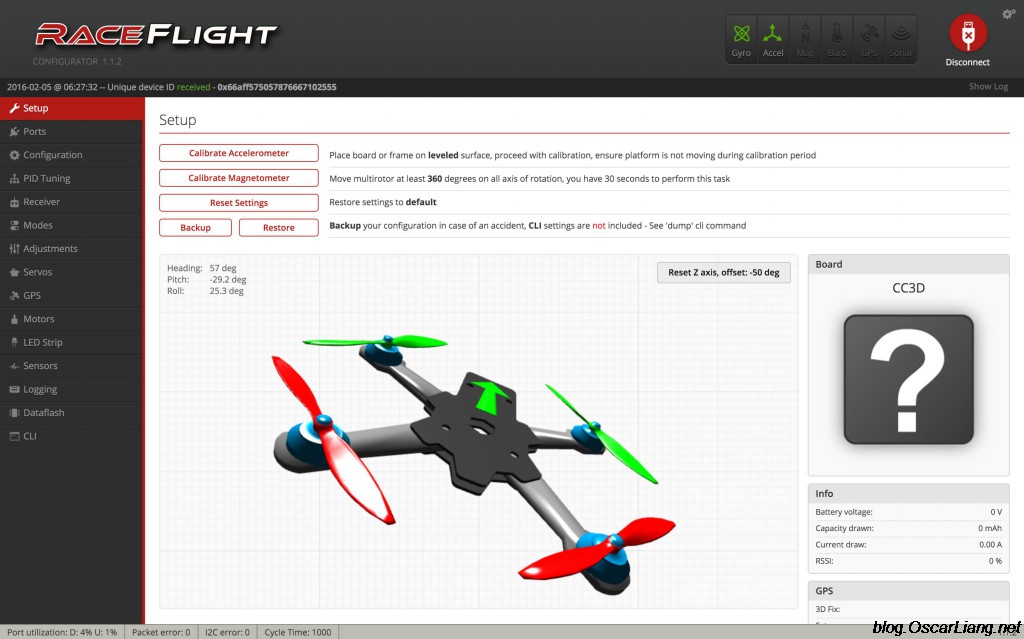
Задача у RS2K состояла в том, чтобы перенести многие функции из Cleanflight в Raceflight, так как первый не был готов для работы с новым поколением полетных контроллеров. Betaflight уже использует по максимуму все что можно у полетных контроллеров F1 и F3, поэтому это очень хорошо, что Raceflight начинает использовать новые возможности современных контроллеров.
Настройка Raceflight не так проста, как CF и BF, но как только вы все поймете, это станет обычным делом, как и раньше.
Что такое Multishot
Одной из замечательных особенностей прошивки Raceflight — это протокол MultiShot. Это самый быстрый альтернативный протокол PWM-сигнала на данный момент. Для сравнения, OneShot125 (125-250us), который был первоначально создан Flyduino, в 8 раз быстрее, чем стандартный протокол PWM. MultiShot (5-25us) примерно в 10 раз быстрее, чем Oneshot125 (OS125)!
Недавно Flyduino вышел с новым протоколом, который называется OneShot42 (OS42), он в 3 раза быстрее, чем оригинальный OS125, но все равно не такой быстрый, как Multishot.
Стоит отметить, что не все регуляторы оборотов могут обрабатывать Multishot. Первые тесты проводились на F330 и Atmel и они не смогли нормально работать на нем. Для этой прошивки подходят только регуляторы нового поколения. По этой причине долго обсуждали регулятор DYS XM20A (Silabs F390) как замену Littlebee 20A (Silabs F330).
Хотя есть люди, которые используют с этой прошивкой регуляторы Littlebee 20A и у них все нормально, но лучше заранее уточните совместимость регуляторов с протоколом мультишот и прошивкой Raceflight.
Технические особенности Multishot
Маленькое время цикла и быстрая работа MultiShot-сигнала означает минимальные задержки в системе. Многие пилоты считают, что такая скорость уже лишняя, так как человек физически ограничен в скорости реакции и мы просто не будем сами успевать посылать с пульта новые значения. Некоторые даже критиковали этот протокол как тупиковая ветвь, так как в погоне за наименьшим количеством циклов наблюдалось снижение эффективности работы.
Теоретически, с более низкой задержкой в системе, квадрокоптер будет работать более активно, основываясь на текущих значениях датчика напряжения, в то время как PID настройки будут менее значимы в мультикоптерах.
Помимо высокой производительности, есть также и задержка управления. Например, когда вы летите и внезапно на пути оказалось препятствие и в этот момент будет некоторая задержка до момента, как дрон обработает команду по предотвращению столкновения и облёте препятствия. Задержка происходит на уровнях FPV, радиосвязи, а также время обработки сигналов полетным контроллером и регулятором оборотов.
Все это создает довольно большой разрыв между командой пилота и реальной реакцией квадрокоптера, поэтому мое мнение, что каждая доля момента, которую мы можем сократить, в конечном итоге позволит нам лучше контролировать дрон в воздухе.
Разработка Raceflight и Multishot
Первоначально они были разработаны для использования с контроллерами F4, но теперь поддерживают F1 и F3. В настоящий момент поддерживаются следующие контроллеры полета:
- Afro Mini F1
- AlienFlightF4
- AlienWii F1/F3
- BlueJayF4
- CC3D F1
- Colibri – TBS Powercube F3
- Naze32 F1
- Motolab Tornado F3
- Revo F4
- Revo Nano F4
- RMRC Dodo F3
- Sparky2 F4
- SPRacing F3
- VRCore F4
Лучшее в этом проекте то, что Доминик и Борис, а так же другие члены команды используя открытый исходный код, помогают улучшать эту прошивку, делая ее еще лучше для нас всех.
Проект Raceflight выглядит многообещающим даже для контроллеров F1. В любом случае, этот проект очень хорош и направлен на то, чтобы улучшить характеристики ваших квадрокоптеров.
Выводы
Выбрать ли Raceflight взамен Cleanflight или Betaflight? Здесь уже ваши вкусы и предпочтения, в конце концов — смотря какое у вас оборудование, поддерживает ли оно это все. То, что работает у других, может не работать у вас и наоборот. Больше всего я получаю удовольствия от этого хобби в тестировании новых функций и разных штук, чем сам полет, думаю со мной многие согласятся. Выбор использовать Raceflight или нет — только за вами.
Страница разработчиков на ГитХабе, там же можно скачать Raceflight:
Raceflight Wiki https://github.com/rs2k/raceflight/wiki
