В этой статье вы узнаете, что делать, если квадрокоптер не запускается (не запускает двигатели, не армится), а также, обсудим основные проблемы, которые могут возникать при снятии с охраны квадрокоптера.
Оригинал: https://oscarliang.com
- Основные проверки
- Как проверить проблему арминга в Betaflight
- Betaflight Configurator
- CLI
- Пищалка (Buzzer beeper)
- Таблица для поиска проблем с запуском квадрокоптера посредством сравнения числа из Arming flag
- Другие проблемы
- Акселерометр
- Большая загрузка процессора
- Газ, он же Throttle, он же дроссельная заслонка
- Порог Морона
Основные проверки
Для идентификации проблемы, нужно выполнить ряд проверок:
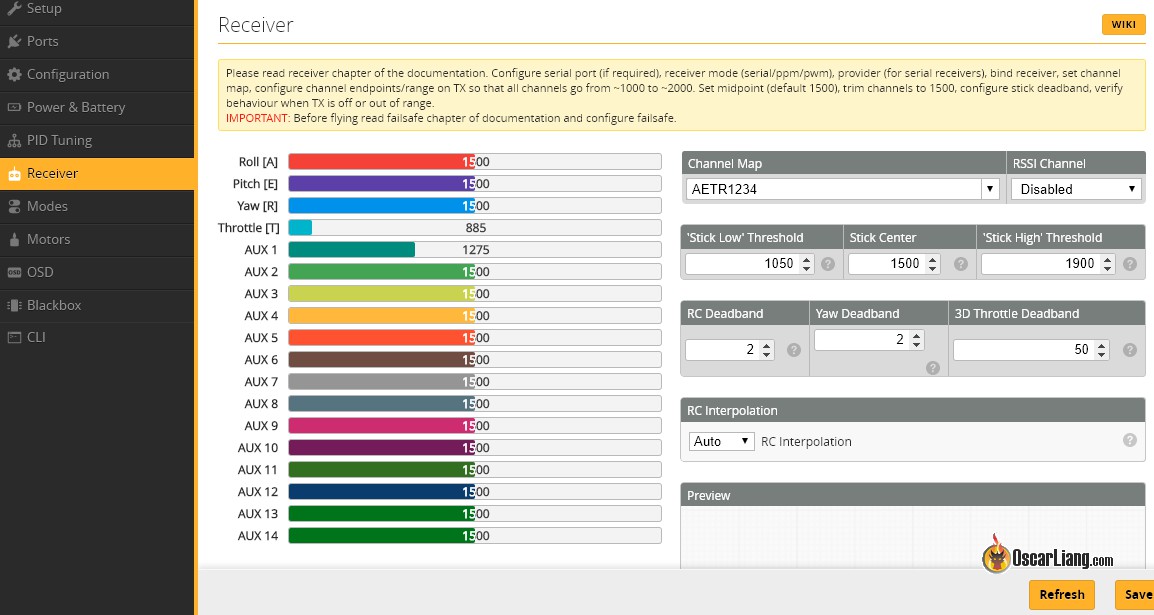
- Проверить, корректно ли работает приемник. Для этого нужно зайти в Betaflight во вкладку «Receiver» и подвигать стики пульта — каждое движение должно правильно отображаться на графике (должны двигаться полоски состояния).
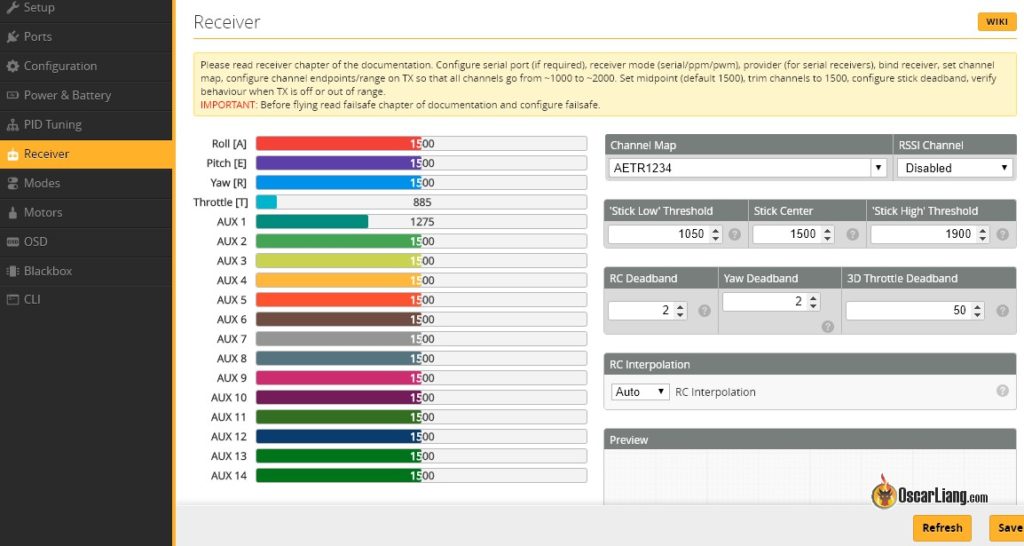
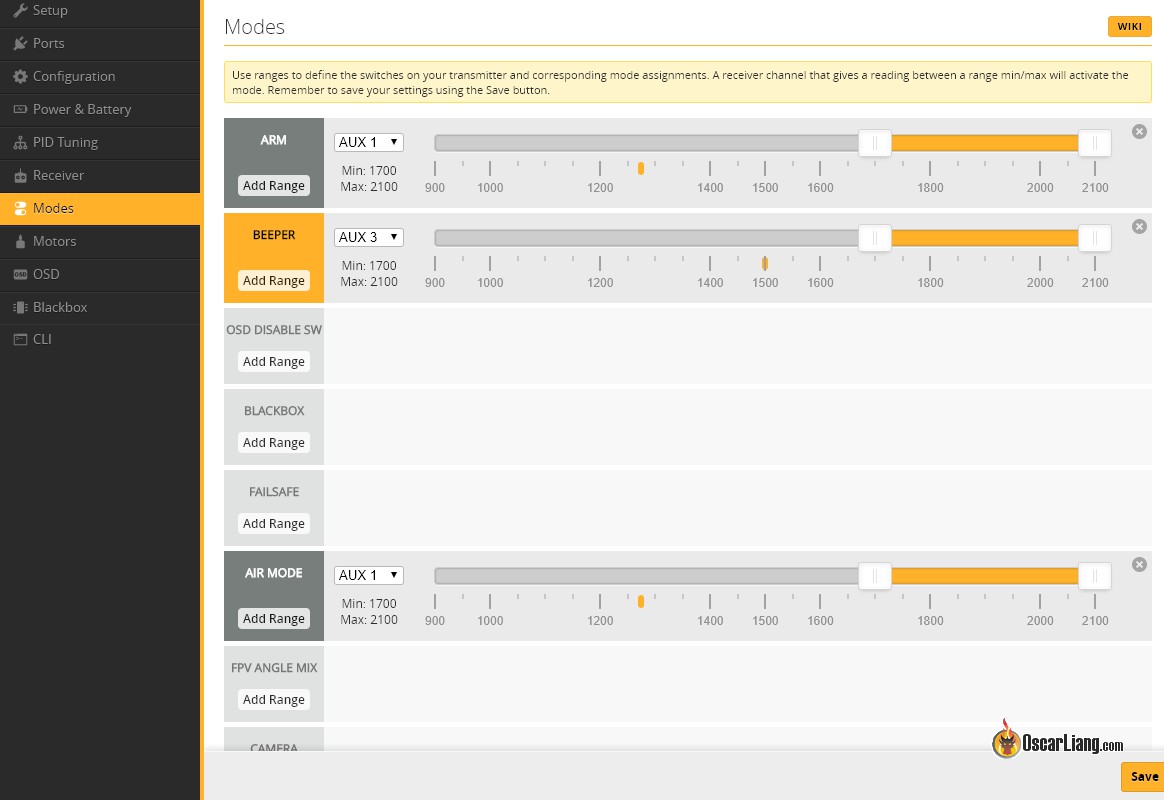
- Проверьте, настроен ли пункт ARM во вкладке Modes, должен быть выбран правильный канал (обычно это AUX1), а желтые ползунки расположены в правой части, определяющие положение переключателя. При перемещении переключателя в положение ON, нижний индикатор должен быть в зоне желтых ползунков.
- Если к дрону подключен USB (к ПК), то будет активна автоматическая защита. Отсоедините USB-кабель.
Если эти пункты проверены, но проблема не решена, то читайте дальше.
Как проверить проблему арминга в Betaflight
Если у вас есть OSD Betaflight, добавьте на экран отображение «Warnings» и выберите отображение «Arming Disabled«, это позволит понять, что именно не дает запустить двигатели квадрокоптера.
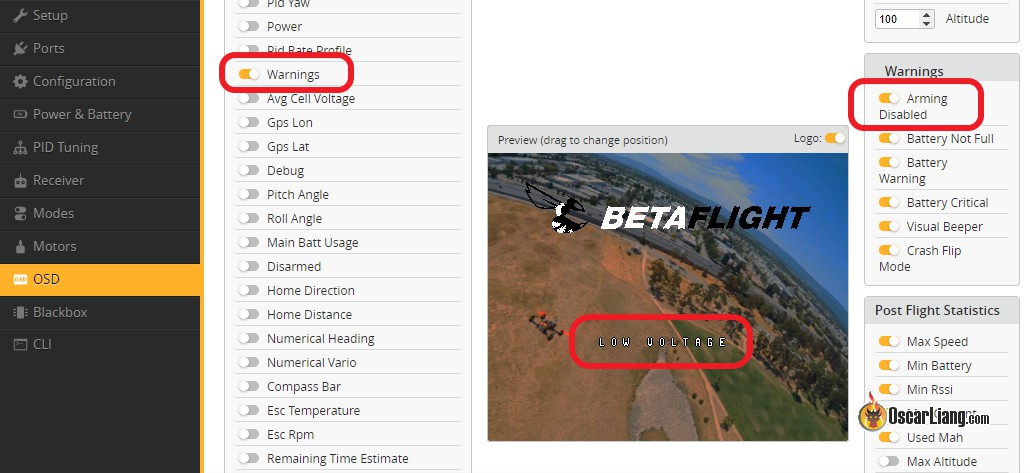
Если у вас нет OSD Betaflight, то вы можете проверить флажок «Arming Disable Flag» в Betaflight, так вы тоже сможете понять, что мешает заармиться дрону.
Есть несколько способов проверить проблему с помощью «Arming Disable Flag», для этого потребуется:
- Betaflight Configurator
- CLI
- Пищалка (Buzzer)
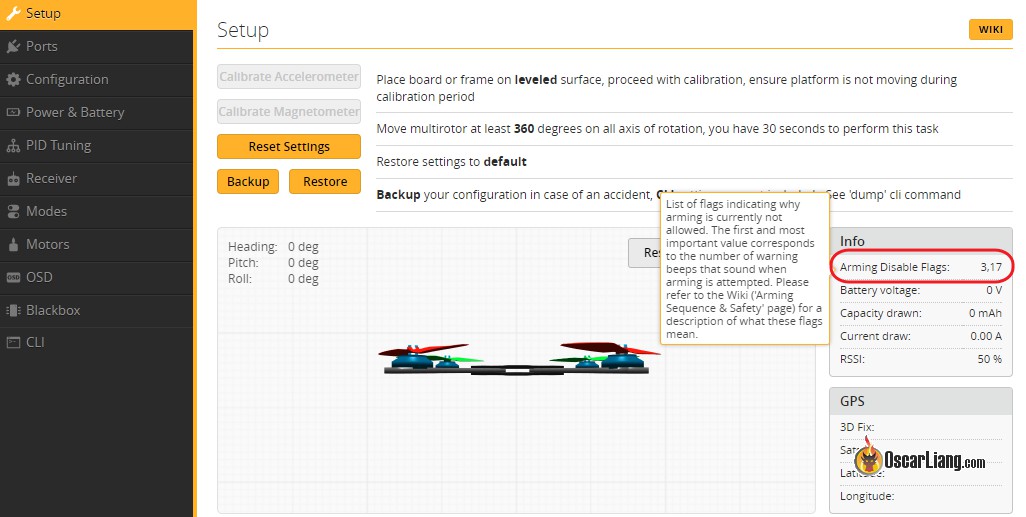
Betaflight Configurator
Зайдите в Betaflight конфигуратора с помощью компьютера во вкладку «Setup», блок «Info», там будет строчка «Arming Disable Flag»:
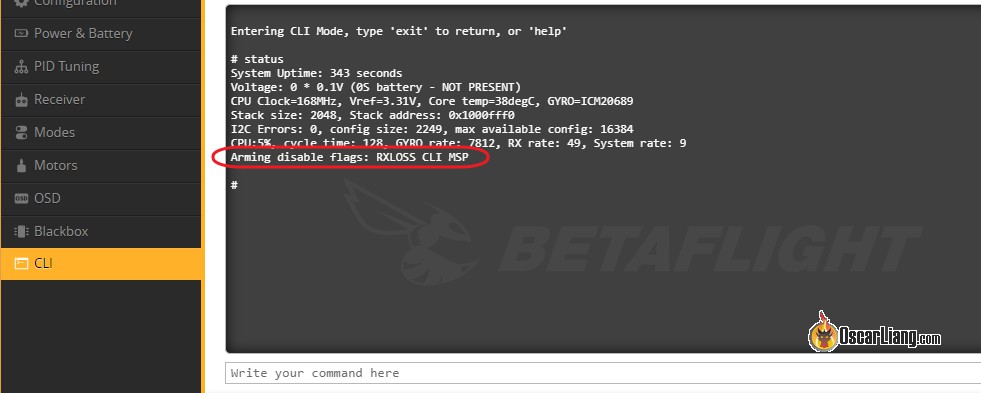
CLI
Альтернативной проверкой будет комнадная строка. Зайдите в CLI (Betaflight) и введите команду «status«, в конце будет информация о «Arming Disable Flags»:
Команда доступна в прошивке Betaflight версии 3.2 и выше.
Пищалка (Buzzer beeper)
Если нет возможности оперативно подключиться к компьютеру, можно использовать пищалку как индикатор конкретной проблемы. Звук можно разделить на следующие части:
- 5 коротких сигналов — не обращаем внимания, это норма;
- несколько длинных звуковых сигналов;
- несколько коротких звуковых сигналов с длинными интервалами.
Каждый длинный звуковой сигнал соответствует цифре 5, а короткий — 1. Цифру arming flag можно рассчитать по формуле:
5 x <количество длинных сигналов> + <количество коротких сигналов>
Пример:
- 0 длинных сигналов и 2 коротких = 2
- 1 длинный сигнал и 3 коротких = 8
- 2 длинных сигнала + 0 коротких = 10
Таблица для поиска проблем с запуском квадрокоптера посредством сравнения числа из Arming flag
Как только вы узнаете цифру флага или название проблемы, смотрите эту таблицу для определения проблемы и ее решения. Таблица взята из Betaflight wiki и переведена для profpv.ru:
| Название | Описание | Код пищалки | Что нужно сделать | ||
|---|---|---|---|---|---|
| BF 3.2 | BF 3.3 | BF 3.4 | |||
| NOGYRO | гироскоп не найден или поврежден | 1 | 1 | 1 | Это может быть аппаратный сбой. Попробуйте залить прошлую версию прошивки если она работает, то дело в прошивке, а не в аппаратной части. |
| FAILSAFE | Активирован Failsafe | 2 | 2 | 2 | Исправьте условия активации Failsafe. |
| RX LOSS | Сигнал приемника не обнаружен | 3 | 3 | 3 | Приемник неисправен или нет связи с пультом. |
| BAD RX | После срабатывания Failsafe приемник остался включеным | 4 | 4 | 4 | Выключите и включите питания к приемнику (дрону). |
| BOXFAILSAFE | Включен переключатель «FAILSAFE» | 5 | 5 | 5 | Смотрите FAILSAFE». |
| RUNAWAY | Активировалась функция «Runway Takeoff Prevention» | 6 | 6 | Это функция проверяет несколько параметров для безопасного старта и если проверка обнаружит, что моторы настроены не в том порядке, гироскоп не смог определить правильное положение (дрон наклонен), установлены неправильные пропеллеры и тд., то сработает эта функция. Для исправления: отключите и включите питание квадрокоптера. | |
| THROTTLE | Стик газа (Throttle) настроен на слишком большое значение | 6 | 7 | 7 | Убедитесь, что значение стика газа настроено верно — min_check. |
| ANGLE | Летательный аппарат не соответствует уровню | 7 | 8 | 8 | Установить уровень в пределах small_angle степени (25 по умолчанию). |
| BOOT GRACE | Попытка запуска сразу после включения питания | 8 | 9 | 9 | После включения питания подождать pwr_on_arm_grace секунд (по умолчанию 5). |
| NO PREARM | Переключатель арминга не настроен или не включен | 9 | 10 | 10 | Поменяйте положение переключателя или настройте его. |
| LOAD | Система слишком нагружена для безопасного полета | 10 | 11 | 11 | Пересмотрите настройки полетного контроллера и отключите ненужные функции. |
| CALIB | Датчики еще калибруются | 11 | 12 | 12 | Дождитесь окончания калибровки датчиков. |
| CLI | Активирована командная строка (CLI) | 12 | 13 | 13 | Выйдите из командной строки (CLI). |
| CMS | CMS (меню настроек) активировано через OSD или другой экран | 13 | 14 | 14 | Выйдите из настроек (или из OSD). |
| OSD | Включено меню OSD | 14 | 15 | 15 | Выйдите из меню OSD. |
| BST | Устройство Black Sheep Telemetry (TBS Core Pro, например) выключено и не позволяет запустить дрон | 15 | 16 | 16 | Прочитайте инструкцию к своему доп.оборудованию. |
| MSP | Активно соединение MSP, возможно через Betaflight Configurator | 16 | 17 | 17 | Разорвите соединение с Betaflight Configurator. |
| PARALYZE | Активен режим Paralyze | 18 | Отключите питание, затем включите. | ||
| GPS | GPS не нашел нужное количество спутников | 19 | Ожидайте соединение с нужным количеством спутников GPS. | ||
| ARM SWITCH | Стик газа в опасном положении | 17 | 18 | 20 | Переместите стик газа в безопасное положение (на минимум, обычно это нижнее положение). |
Другие проблемы
Акселерометр
Квадрокоптер может находиться на неровной поверхности, либо акселерометр не откалиброван. Попробуйте откалибровать датчик на ровной поверхности и взлетать пробуйте тоже с ровной поверхности. Если это не помогло, попробуйте увеличить в CLI параметр small_angle degrees, по умолчанию он 25. В крайнем случае, можно отключить акселерометр, если вы не летаете в режиме стабилизации.
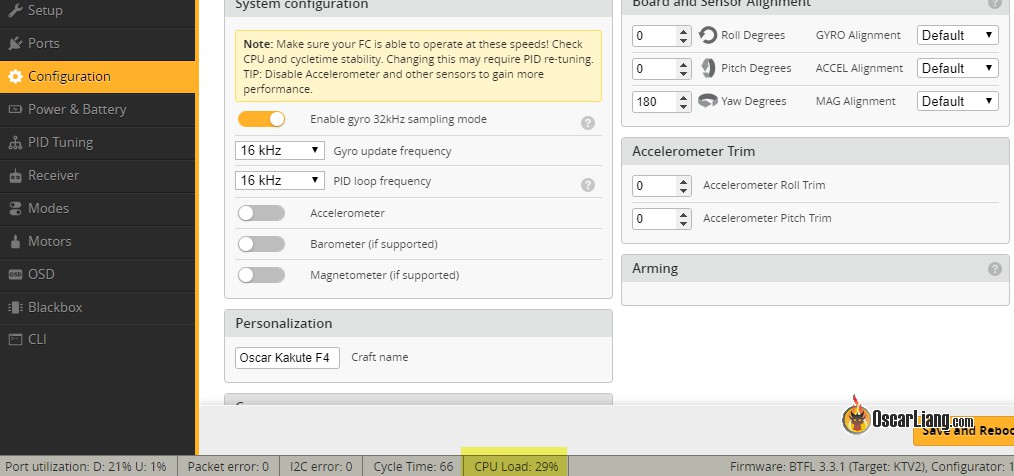
Большая загрузка процессора
Если вы включили все что нужно и ненужно, то скорее всего, процессор будет загружен на полную. Отключите лишние функции и постарайтесь добиться загрузки процессора до 50%. В противном случае, при полной загрузке полетный контроллер запретит взлет.
Газ, он же Throttle, он же дроссельная заслонка
Вам нужно проверить, какое нижнее значение у стика газа, по-хорошему, у всех каналов нижнее значение должно быть 1000, а верхнее 2000. Настройки производятся в зависимости от аппаратуры — либо в пульте, либо в конфигураторе во вкладке Configuration или Receiver. Также при подаче питания дрону, нужно убедиться, что стик газа в нижнем положении.
В прошивке Betaflight есть автоматическая защита, регулируется параметром «Min_Check», по умолчанию установлен на 1050 и, если к примеру, у вас стик газа в нижнем положении на 1060, то прошивка не даст запустить двигатели. Вам нужно настроить значения нижнего предела стика в разделах конфигурация и ресивер. Нужно добиться того, чтобы стик газа в нижнем положении показывал цифру ниже 1050.
Порог Морона
Некоторые FC могут иметь более чувствительные гироскопы, и квадрокоптер откажется запускаться после включения питания. При увеличении порога Moron в CLI может снизить чувствительность гироскопа во время инициализации. Попробуйте установить его на 100 или даже 120.
