
Для начала давайте определим значение аббревиатур, которые я буду использовать:
- TX
- RX
TX (от английского transmitter), то есть передатчик.
RX (от английского receiver), то есть приемник
Оригинал статьи: https://oscarliang.com
В роли передатчика у нас выступает пульт, в роли приемника, черная коробочка, которая так и называется — приемник, он идет в комплекте с пультом и именно его вы устанавливаете в квадрокоптере. Приемник обрабатывает команды с пульта и отправляет их полетному контроллеру:
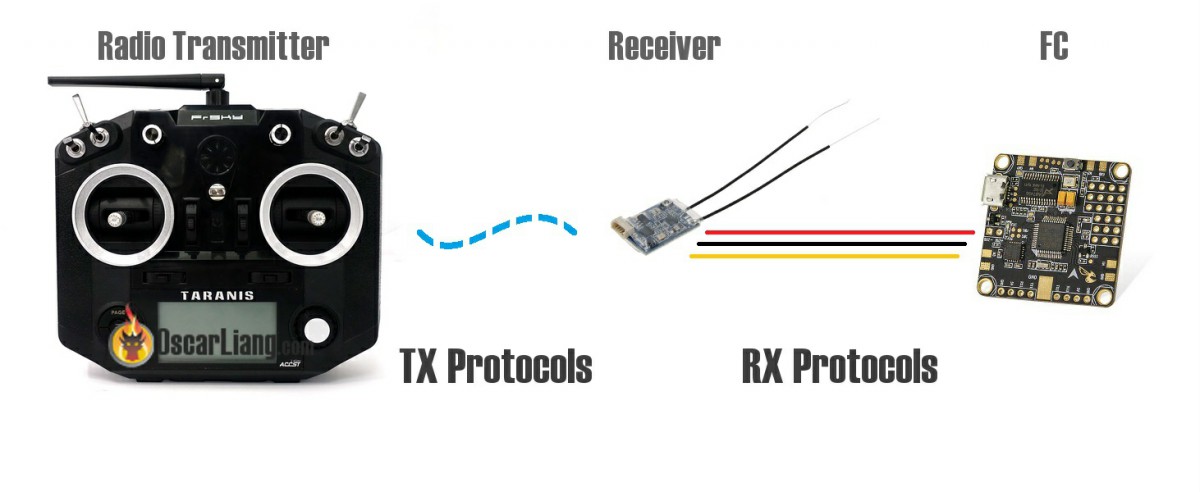
Когда начинается обсуждение протоколов, пилоты называют аббревиатуры PWM, PPM, SBUS, DSM2, DSMX, SUMD, именно их значение и принцип работы я раскрою в этой теме, а так же те RX и TX, где они работают.
Некоторые RX протоколы универсальны для использования на различных приемниках, а некоторые сделаны под конкретную марку. Ниже список, какой протокол поддерживается конкретной маркой:
- PWM (универсальный)
- PPM (универсальный)
- PCM (универсальный)
- SBUS (Futaba, Frsky)
- IBUS (Flysky)
- XBUS (JR)
- MSP (Multiwii)
- SUMD (Graupner)
- SUMH (Graupner)
- CRSF – Crossfire (TBS)
- FPort (Frsky)
Как видите, все более менее современные протоколы сделаны под конкретные марки производителей, универсальные только устаревшие протоколы.
У TX протоколов все тоже самое, протоколы, с помощью которых они общаются с приемником, также отличается для всех марок:
- D8 (Frsky)
- D16 (Frsky)
- LR12 (Frsky)
- DSM (Spektrum)
- DSM2 (Spektrum)
- DSMX (Spektrum)
- AFHDS (Flysky)
- AFHDS 2A (Flysky)
- A-FHSS (Hitec)
- FASST (Futaba)
- Hi-Sky (Deviation)
- Протокол PWM – Pulse Width Modulation
- Протокол PPM – Pulse Position Modulation
- Протокол PCM – Pulse Code Modulation
- Последовательные протоколы (Serial)
- Протокол SBUS (S.BUS, Serial BUS) – марки Frsky и Futaba
- Протокол CRSF (Crossfire)
- Протокол IBUS – марки Flysky
- Протокол XBUS – марки JR
- Протокол MSP — марки Multiwii
- Протокол Graupner SUMD
- Протокол Graupner SumH
- Протокол FPort — марки Frsky и Betaflight
- Какой выбрать протокол
- Протоколы передатчиков Spektrum: DSM2 и DSMX
- Протоколы Spektrum DSM2 и DSMX
- Spektrum Satellite
- Протоколы передатчиков (пультов) Frsky
- Какая задержка у протоколов
Протокол PWM – Pulse Width Modulation
Это базовый протокол радиосвязи, именно с него все и начиналось, также он и самый распространенный. В начале развития хобби авиамоделей, были только самолеты с сервоприводами и каждый сервопривод управлялся по PWM-протоколу и имел свой персональный канал. Но и сегодня такой способ используется.
Квадрокоптерам требуется не менее 4-5 каналов для нормальной работы.
PWM — это широтно-импульсная модуляция (ШИМ). Это аналоговый сигнал, где длительность импульса определяет действующее значение выходного напряжения и, тем самым, положение качалки сервопривода или положение рычажка газа. Длительность импульсов обычно варьируется от 1000 мкс до 2000 мкс (микросекунда), при этом 1000 мкс — это минимум и 2000 мкс — максимум. MfG (с)
Как я говорил выше, протокол еще популярен, но уже сильно вытеснен такими протоколами как SBUS и PPM, так как у PWM слишком много проводов:
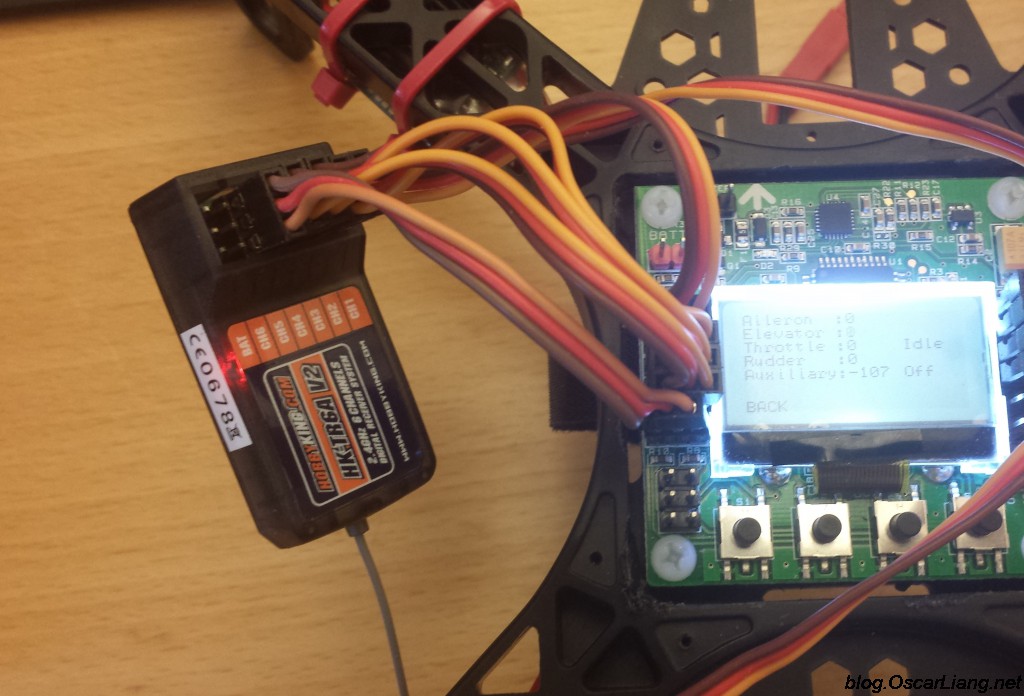
Протокол PPM – Pulse Position Modulation
Этот протокол также называется CPPM или PPMSUM. Отличается от предыдущего тем, что для множества каналов (правда максимум для  нужен всего лишь 1 провод. А теперь посмотрите на фотку выше и ощутите разницу, один провод заменяет эту кучу. Нужно подключить только провод питания, сигнала и заземления, итого 3 провода, фото ниже:
нужен всего лишь 1 провод. А теперь посмотрите на фотку выше и ощутите разницу, один провод заменяет эту кучу. Нужно подключить только провод питания, сигнала и заземления, итого 3 провода, фото ниже:

Сигнал по проводу посылается друг за другом, но модулируется по-разному. Его называют «аналоговым сигналом временной области», по точности он немного уступает PWM, но его проще подключать и настраивать, к тому же, его поддерживают большинство полетных контроллеров.
Протокол PCM – Pulse Code Modulation
Этот протокол работает по принципу импульсной модуляции, принцип работы похожа на протокол PPM. PCM это уже цифровой сигнал, а PPM аналоговый, например. PCM умеет распознавать и исправлять ошибки в сигнале, однако, это еще немало зависит и от используемого оборудования.
Также, протокол PCM надежнее, чем аналоговые и менее восприимчив к помехам, но из-за этого ему нужен преобразователь сигнала, а это влечет за собой более высокую цену оборудования.
Последовательные протоколы (Serial)
Сюда входят SBUS, XBUS, MSP, IBUS, SUMD. Это цифровые протоколы, а значит не имеют потерь, для работы требуется всего 3 провода — сигнал, питание и заземление. Для подключения приемников с этими протоколами требуется последовательный порт на ПК.
Протокол SBUS (S.BUS, Serial BUS) – марки Frsky и Futaba
SBUS — этот протокол сделали для своей аппаратуры разработчики Frsky и Futaba и он поддерживает до 18 каналов.
Протокол SBUS — это инвертированный сигнал, который использует UART для последовательной передачи данных. На сегодня все современные полетные контроллеры, не говоря уже о поколении F7 имеют UART порт и отлично по нему работают с периферией, но для того, чтобы прочитать его, нужен инвертор, встроенный или внешний, а вот он уже есть не у всех. У Naze32 Rev5 инвертора нет, а в F3, Pixhawks инвертор уже встроен. Этот протокол хорош тем, что для его работы нужен 1 провод на все 18 каналов.
Протокол CRSF (Crossfire)
Фирма TBS разработала этот протокол для своей аппаратуры Crossfire. Это цифровой протокол с принципом работы как SBUS, но у него более быстрая скорость работы, позволяющая использовать Телеметрию без использования доп.портов. По этому протоколу даже можно настраивать полетный контроллер.
Протокол IBUS – марки Flysky
IBUS это протокол для аппаратуры фирмы FlySky, такой же цифровой «компактный» протокол, работающий в обе стороны, то есть по одному проводу можно управлять сервоприводами и получать данные с датчиков.
Протокол XBUS – марки JR
Такой же как IBUS, но для аппаратуры фирмы JR, имеет поддержку 14 каналов. Отличается от других наименьшей задержкой по времени между каналами.
Протокол MSP — марки Multiwii
Создан для оборудования фирмы Multiwii, поддерживает 8 каналов связи, в остальном такой же, как и все.
Протокол Graupner SUMD
Очередной цифровой протокол как Speksat и SBUS, у него тоже все каналы работают по 1 проводу исключая задержки, но у него есть ряд преимуществ:
- ему не нужен инвертор сигнала, в отличии от SBUS
- у него лучше разрешение и меньшие задержки, чем у PPM
Протокол Graupner SumH
Устаревший протокол фирмы Graupner. Компанией уже было выпущено обновление прошивки для приемников, чтобы те могли дальше работать на протоколе SUMD.
Протокол FPort — марки Frsky и Betaflight
Новейший протокол связи от разработчиков Frsky и Betaflight, направленный на еще более быструю работу и максимальную компактность, для работы принятия и обработки всех сигналов телеметрии и управления, ему нужен только 1 провод.Протокол совместим с полетниками F4 без аппаратных инверторов.
Он еще в процессе доработки, но у нас уже есть статья о нем: https://profpv.ru/что-такое-fport-frsky-и-как-настроить/
Какой выбрать протокол
Отвечая на этот вопрос, я скажу, что тут главное какое оборудование вы используете или будете использовать. Я рекомендую использовать PPM или SBUS, а если аппаратура FlySky, то естественно IBUS. Если вы собираете гоночный квадрокоптер, то используйте SBUS и IBUS протоколы, у них наименьшая задержка.
Протоколы передатчиков Spektrum: DSM2 и DSMX
Фирма спектрум специализируется на радиооборудовании для радио моделей. Их часто упоминают на форумах и сайтах. DSM2 и DSMX это протоколы свзяи передатчик-приемник, которые используются в оборудовании Spektrum.
Протоколы (копии SBUS) для Spektrum DSM2 называются SPEKTRUM1024, а для DSMX называется SPEKTRUM2048.
Протоколы Spektrum DSM2 и DSMX
Протокол DSM2 очень устойчивый к помехам как из вне, так и от помех создаваемых другими передатчиками. Еще он имеет крутую особенность — если на текущей частоте случается какой-то сбой, он тут же переключается на резервную, таким образом вы не потеряете управление над моделью.
DSMX это улучшенная версия протокола на основе DSM2, отличие лишь в том, что DSMX умеет переключаться на резервный канал за единицы миллисекунд, благодаря чему вы даже и не заметите какой-либо сбой.
На протоколе DSM2 нужно летать вдали от сетей Wi-Fi, микроволновок, беспроводных камер. DSMX это тоже самое, но чуть надежнее.
Spektrum Satellite
Это дополнительная антенна, которая подключается к пульту и усиливает мощность сигнала.
Протоколы передатчиков (пультов) Frsky
Название протокола зависит от того, какие модули и приемники используются с передатчиком:
- D16: для приемников X-серии, таких как X4R-SB, XSR, X8R
- D8: для приемников D и V-серий, таких как D4R-II, D8R-II+, V8FR-II, VD5M, etc
- LR12: для приемников L9R
Какая задержка у протоколов
Были протестированы несколько самых популярных приемников и составлен рейтинг приемников, ниже вы можете увидеть, какой приемник самый быстрый:
- Flysky i6X – 13.7 мс
- Turnigy Evolution – 14.6 мс
- Crossfire (X10) – 19.5 мс
- Frsky Horus X10 – 31.5 мс
- Frsky QX7 – 36.3 мс
- Spektrum DX6i – 41.5 мс
13,7 мс задержка конечно крутая, но это не самый главный критерий выбора аппаратуры, нужно также учитывать качество аппаратуры, качество соединений, особенности. Ниже таблица с тестированием:

