Многие опытные пилоты и тем более новички, не знают о том, что значат параметры в BlHeli_32 (BlHeliSuite32) и поэтому боятся их менять. Некоторые параметры и правда лучше не трогать. В статье вы узнаете о тех параметрах, которые можно настраивать для гоночного квадрокоптера. Все остальные параметры предназначены в основном для самолетов и монокрыльев.
PWM Frequency
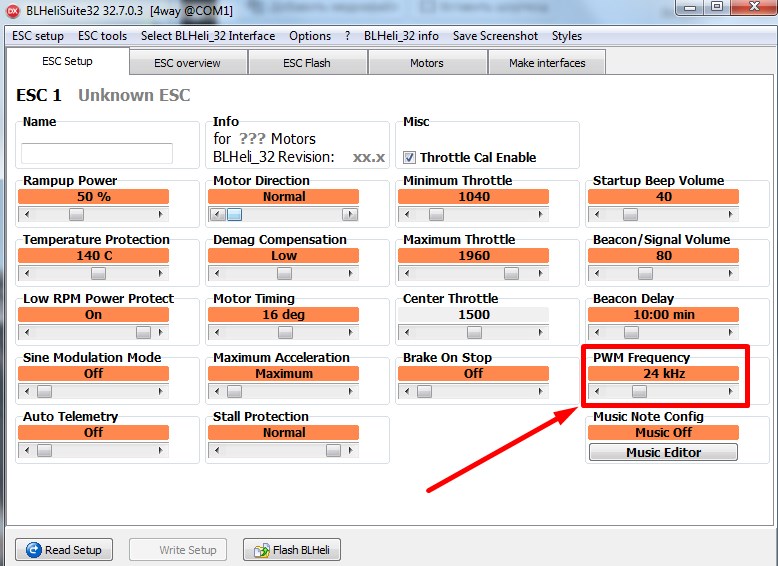
Вы можете подумать, что это параметр из Betaflight конфигуратора, но это не так.
Этот параметр — внутренний протокол регулятора оборотов и определяет частоту отправки данных на полевой транзистор.
По умолчанию, в настройках установлено на 24 kHz (килогерцы). Во многих видео о настройке, рекомендуют установить это значение на 48 kHz.И они правы.
Увеличение этого параметра позволяет убрать потенциальную вибрацию при работе моторов и делает дрон более плавным.
Если у вашего квадрокоптера присутствует вибрация и при 48 kHz, то попробуйте выбрать другое значение от 24 до 48.
Motor Timing

Этот параметр в BlHeli_32 можно интерпретировать так: двигатель это турникет, а этот параметр — ваша рука. Ваша задача — одной рукой крутить вот такой турникет.
Чем ниже значение параметра, там вам ближе нужно стоять к турникету и соответственно, быстрее перебирать руками, а значит и очень часто прикладывать силу, хоть и меньшую. Чем значение больше — там дальше вы стоите и вам удобнее перебирать рукой — вы взялись за дальний край и корпусом толкнули турникет, вам это нужно делать реже, но приходится прикладывать больше сил в единицу времени. Вот по такому принципу и работает параметр Motor Timing. Это время, через которое регуляторы будут подталкивать двигатель.
Тут есть и свои подводные камни. Например, если сделать значение слишком низким, например 14, то параметр может создать рассинхронизацию работы двигателей. Если сделать значение слишком большим, то двигатель начнет потреблять много энергии, но при этом его мощность не увеличится.
Хорошим значением считается выбор от 23 до 25.
Поэтому, выбор значение до 23, либо выше 25 — достаточно бесполезное занятие, которое не приведет к оптимизации работы моторов.
Кстати, если выставить ползунок на минимум, то активируется режим «авто», который автоматически определит лучшее значение для работы.
Demag Compensation

Объяснять этот параметр в BlHeli_32 будем тоже на аналогии с турникетом. Представьте, что вы взялись за дальнюю ручку турникета (правая):
И потянули на себя, чтобы далее ее толкнуть для раскручивания. Момент, когда ручка турникета и ваша рука будет перпендикулярна вашему туловищу — будет точкой 0. С этой точки вы начнете толкать турникет, а не тянуть к себе. Именно так работает этот параметр — он определяет, когда начинать «толкать» колокол двигателя, ведь там стоят магниты, помните?
Если у ваших двигателей высокий KV, то можно установить значение на «High».
Startup Beep Volume
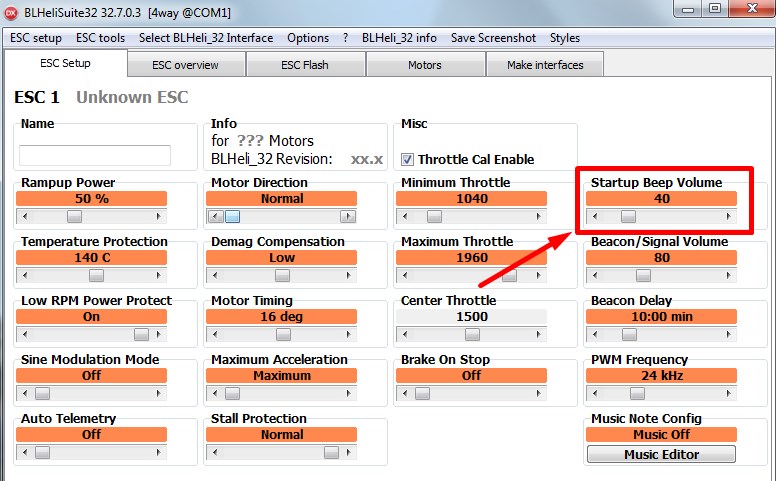
Тут все просто — громкость пищания регуляторов при включении. Вы этот звук всегда слышите. При большом значении писка — они могут разрушиться, так что, будьте осторожны.
Beacon /Signal Volume
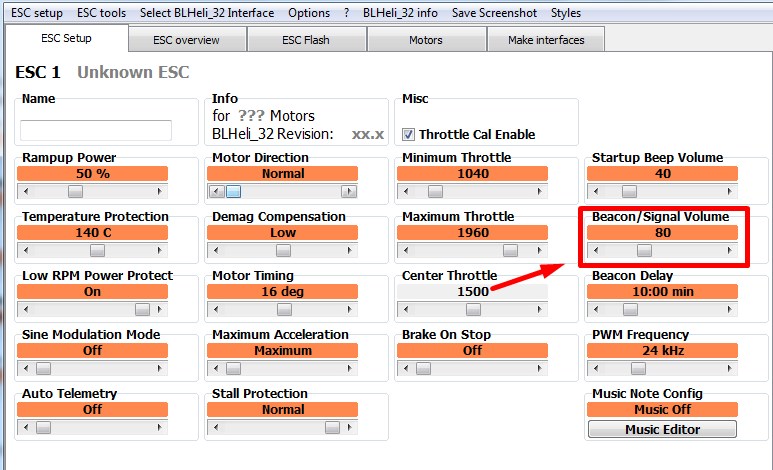
Параметр, который регулирует громкость звука, который издают регуляторы в критических ситуациях, например, когда дрон потерял сигнал с передатчика (пульта) и валяется в траве, либо когда он некоторое время включен, но нет сигнала с пульта.
Здесь тоже самое — большое значение может разрушить регуляторы.
Beacon Delay
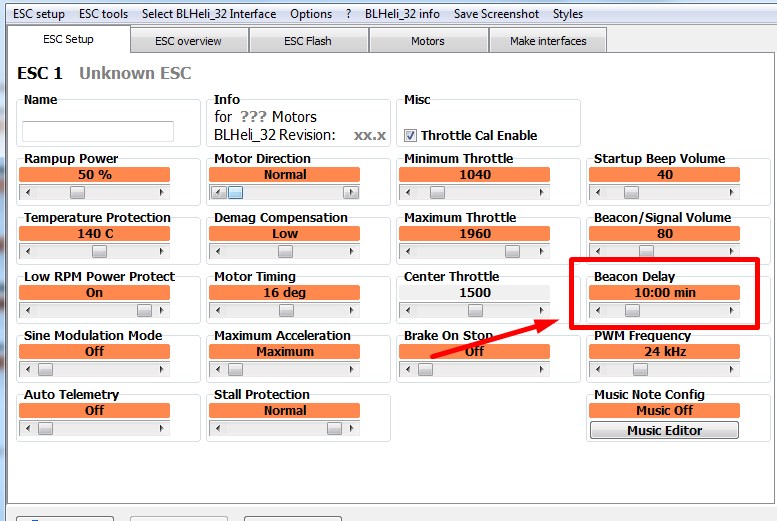
Продолжение параметра выше. Этот параметр определяет, через какое время после потери сигнала, регуляторы начнут пищать. Это может быть минута, может быть 5 или 10 минут. Выбор времени никак не влияет на регуляторы.
Читайте также: Звуки и музыка в регуляторы оборотов (ESC) и моторами | BLHELI_32
