Полетный контроллер (Flight Controller, FC) — это «мозг» квадрокоптера, который обрабатывает данные с датчиков и команду с аппаратуры, стабилизирует полёт и управляет моторами. Без него ни один FPV-дрон не взлетит. В этой статье разберём, как выбрать правильный FC, если вы новичок и хотите летать на аналоговой системе видеопередачи и планируете гонки или фристайл. Мы охватим все размеры дронов — от Tiny Whoop до 5-дюймовых дронов.
- Что делает полетный контроллер
- Основные характеристики при выборе
- 1. Процессор (MCU)
- 2. Гироскоп и датчики
- 3. Количество UART-портов
- 4. BEC — питание для электроники
- 5. Монтажный размер
- 6. Поддержка OSD
- AIO против стека (FC + ESC)
- AIO (All-in-One):
- Стек (отдельный FC и ESC):
- Прошивки: Betaflight, EmuFlight, iNav
- Рекомендации по контроллерам
- Tiny Whoop (1–2″)
- 3 дюймовые и мини-дроны (2–4S)
- 5дюймовыефристайл и гонки (4–6S)
- Выводы
Что делает полетный контроллер
Полетный контроллер получает команды с аппаратуры управления, измеряет ускорения и повороты через гироскоп и акселерометр, и рассчитывает, как скорректировать работу моторов, чтобы дрон летел так, как вы хотите. Это центральный компонент дрона, к которому подключаются:
- Регуляторы оборотов моторов (ESC)
- Приёмник управления (RX)
- Видеопередатчик (VTX)
- Камера
- GPS, барометр, компас и другие датчики (опционально)
Основные характеристики при выборе
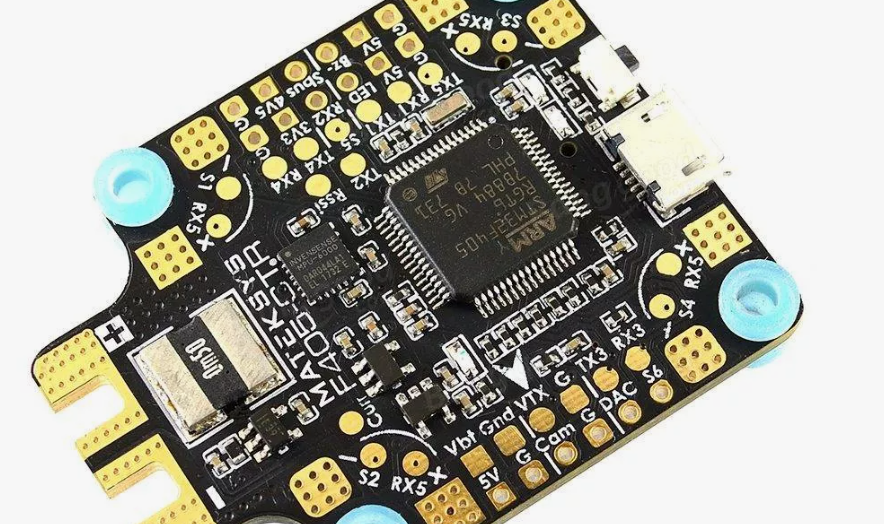
1. Процессор (MCU)
Чем мощнее процессор, тем быстрее контроллер обрабатывает данные. Сегодня популярны:
- F4 — хорош для большинства задач, особенно для новичков. Достаточно производительный и поддерживается большинством прошивок.
- F7 — имеет больше портов и выше производительность. Подходит для больших сборок (например, 5-дюймовых дронов на 6S).
- F3/F1 — устарели и не поддерживают современные прошивки.
Чем выше модель STM32 (например, F722 против F405), тем выше тактовая частота и количество интерфейсов UART, SPI и DMA. Это важно для сложных сборок.
2. Гироскоп и датчики
IMU (инерциальный модуль) включает гироскоп и акселерометр — они измеряют движение дрона. Распространённые гироскопы:
- MPU6000 — стабильный и широко используемый.
- ICM20602, ICM42688 — более чувствительные, но подвержены шуму.
Новые гироскопы дают лучшие показатели, но требуют хорошей виброизоляции (мягкого крепления платы).
Дополнительные сенсоры:
- Барометр — для удержания высоты (не нужен для фристайла).
- Компас — полезен в GPS-сборках, не нужен для гонок.
3. Количество UART-портов
UART — это последовательный порт для подключения приёмника, телеметрии, GPS, управления VTX и т. д. Чем больше — тем лучше:
- Минимум: 3 UART для простых сборок
- Оптимально: 5–6 UART для гибкости
F4-контроллеры обычно имеют 2–4 UART, F7 — до 8. Важно при планировании сложной периферии.
4. BEC — питание для электроники
BEC (Battery Eliminator Circuit) — это встроенный преобразователь, который подаёт стабилизированное питание (обычно 5V и/или 9V) на VTX, приёмник, GPS и т. д.
Обратите внимание на:
- Наличие 5V и 9V выходов
- Токовую нагрузку (например, 5V / 2 А)
Недостаточный ток BEC может привести к отключению VTX или приёмника на высоких оборотах. Лучше иметь запас по току.
5. Монтажный размер
Форм-фактор платы должен соответствовать вашей раме:
- 25.5×25.5 мм — популярно для Tiny Whoop
- 20×20 мм — микро-дроны и 3 дюймовые
- 30.5×30.5 мм — 4–5 дюймовые рамы
Учитывайте и размер платы, и количество слоёв в стеке (некоторые FC идут с отдельным ESC).
6. Поддержка OSD

OSD (On-Screen Display) — функция наложения телеметрии (напряжение, RSSI, таймеры) на видео.
Для аналоговой системы нужен встроенный OSD-чип (чаще всего AT7456E).
Без OSD вы не увидите ключевых данных полёта в очках. Это критично для FPV.
AIO против стека (FC + ESC)
Есть два типа построения электроники:
AIO (All-in-One):

FC и ESC на одной плате. Преимущества:
- Компактность
- Меньше проводов
- Легче и проще
Подходит для: Tiny Whoop, микродронов до 3 дюймов и лёгких CineWhoop.
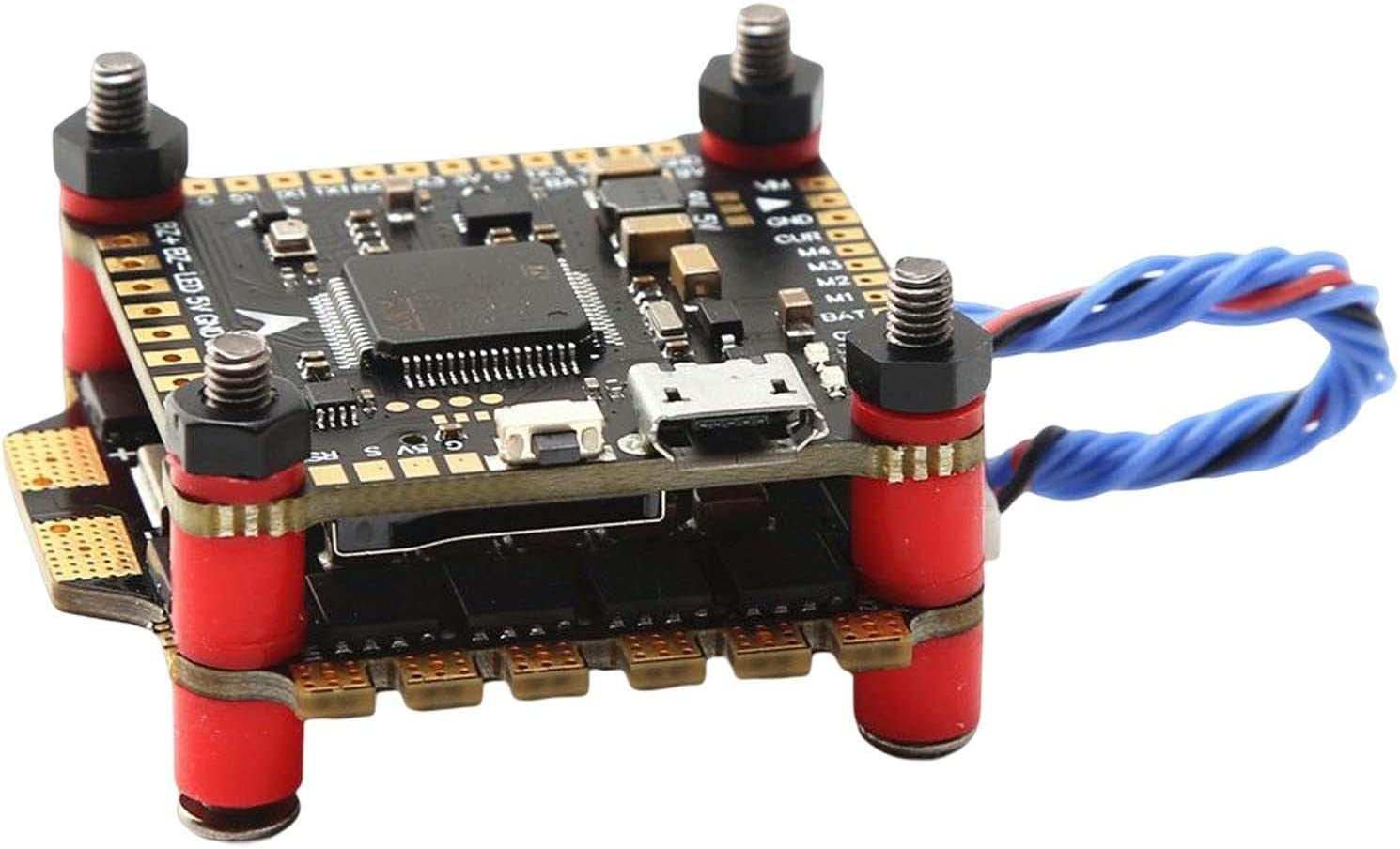
Стек (отдельный FC и ESC):

Каждая плата — отдельный компонент. Преимущества:
- Надёжность
- Лучше охлаждение
- Поддержка высоких токов (4S–6S)
Подходит для: 5 дюймовых рам фристайла, гоночных и тяжёлых дронов.
AIO-платы чаще выходят из строя при падении из-за объединённой схемотехники. У стека проще менять компонент.
Прошивки: Betaflight, EmuFlight, iNav
- Betaflight — самая популярная прошивка для фристайла и гонок. Простая настройка, широкое сообщество, поддержка всех FC.
- EmuFlight — оптимизированный форк Betaflight с альтернативными алгоритмами.
- iNav — больше для навигации и GPS-миссий (для новичка избыточно).
Если контроллер поддерживает Betaflight — он подходит для 99% задач начинающего пилота.
Рекомендации по контроллерам
Tiny Whoop (1–2″)
- BetaFPV F4 12A AIO — F4, встроенный приёмник, 12А ESC, OSD, лёгкий и надёжный.
- Happymodel Crazybee F4 — AIO с отличной совместимостью и компактностью.
3 дюймовые и мини-дроны (2–4S)
- Matek F405-CTR — F4, MPU6000, встроенный PDB и OSD, 5 UART.
- Flywoo Goku F4 — компактный и лёгкий с множеством портов.
5 дюймовые фристайл и гонки (4–6S)
- SpeedyBee F405 V3 — мощный F4, барометр, OSD, два BEC, хорошая фильтрация.
- Holybro Kakute F7 — F7, гироскоп ICM20689, софт-маунт, GPS-совместимость.
Выводы
Если вы новичок и собираете аналоговый FPV-дрон:
- Выбирайте контроллер с F4-процессором, OSD, не менее 3 UART.
- Для Tiny Whoop — AIO, для 5 дюймовые — отдельный стек.
- Проверяйте поддержку Betaflight.
- Убедитесь, что монтажный размер совпадает с рамой.