Все настройки проводились в Betaflight 4.2 на 5-дюймовом дроне для фристайла. Настройки программного обеспечения могут сильно влиять на летные характеристики, поэтому за раз меняйте не более 1 параметра, чтобы точно понимать, что именно вернуть в исходное положение. В процессе настройки были значительно улучшены летные показатели и устранена турбулентность.
Что такое Propwash или турбулентность — это ситуация, которая возникает в момент, когда квадрокоптер находится в свободном падении, вы выравниваете его правым стиком перпендикулярно земле и даете полный газ, либо какую-то высокую планку газа, в этот момент дрон начинает вибрировать и «надрываться» с характерным звуком. Ощущаются провалы. Это и есть турбулентность, «пропвош» или Propwash.
Чтобы не попадать в турбулентность, нужно прибавлять газ плавно и выполнить настройки о которых мы расскажем ниже.
Выполняем настройку
1. Перейдите на вкладку Конфигурация и переключите протокол на DSHOT300 и активируйте двунаправленный DSHOT. Если нет DSHOT300, включите максимально приближенный к нему, например, 400. Рекомендуем включить DSHOT300, вместо DSHOT600 или выше, потому что первый протокол генерирует меньше шума двигателями и снижает нагрузку на процессор. Разница в в задержке между 300 и 600 всего 25 наносекунд — DSHOT300 работает со скоростью 50 наносекунд, а DSHOT600 25 наносекунд.
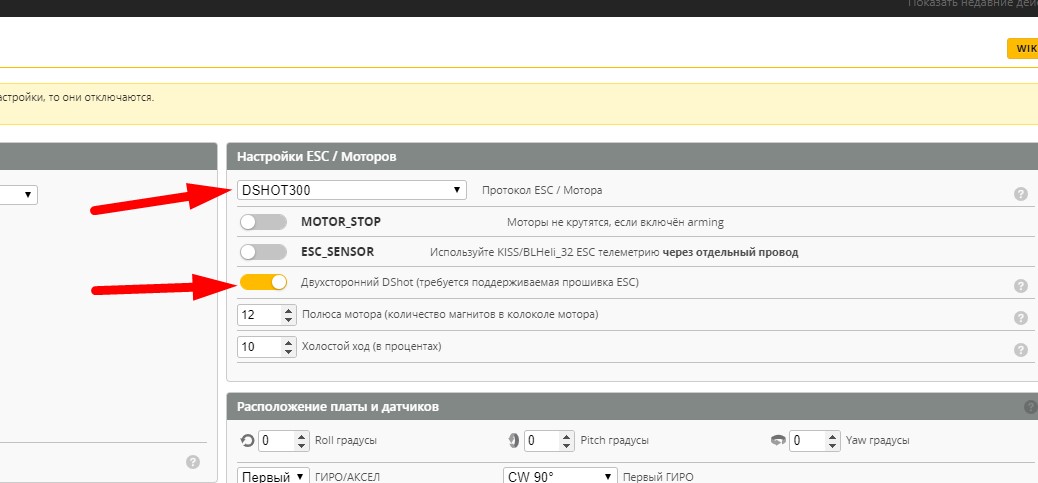
1 наносекунда равняется одной миллиардной части секунды.
Разница в этих протоколах настолько мала, что создаваемые шумы и нагрузка того не стоят. DSHOT600 может работать на частоте 8 kHz, это означает возможность отправлять больше пакетов, но у нас с DSHOT300 еще не были замечены потери пакетов, поэтому выбор очевиден в пользу снижения шумов. То есть, для 300 нужно выбирать частоты обновления 4 kHz, а для 600 — 8 kHz.
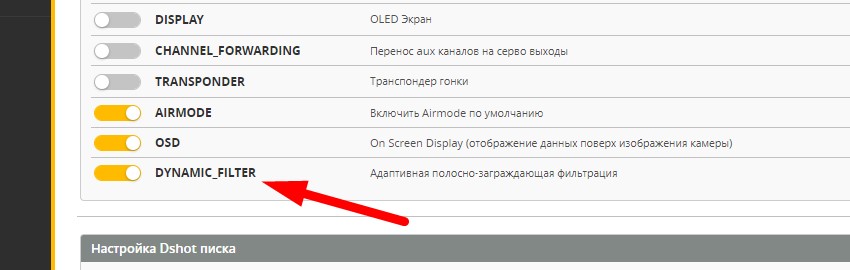
2. Включите Dynamic_Filter:
3. Перейдите на страницу Настройки PID и выберите вкладку Настройки фильтров
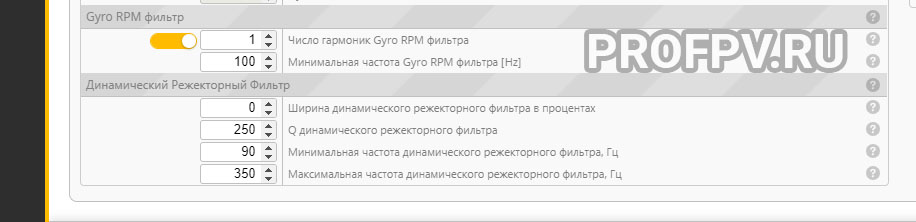
Здесь вы должны найти блок Gyro RPM фильтр. Блок появится только после включения двунаправленного DSHOT:

Установите для «Число гармоник Gyro» значение 1. Этим мы уменьшаем задержку при подаче команд на двигатели, а также уменьшаем фильтрацию данных с гироскопа от полетного контроллера до двигателей. Можете поэкспериментировать и поставить 2 или 3, но скорее всего наилучшим вариантом у вас тоже будет 1. В поле ниже нужно поставить значение 100.
Дальше идет блок Динамический Режекторный Фильтр (Dynamic Notch Filter). Установите в поле:
- Ширина динамического режекторного фильтра в процентах (Dynamic Notch Width Percent) значение 0;
- Q динамического режекторного фильтра (Dynamic Notch Q) значение 250;
- Минимальная частота динамического режекторного фильтра, Гц (Dynamic Notch Min Hz) значение 90;
- Максимальная частота динамического режекторного фильтра, Гц (Dynamic Notch Max Hz) значение 350.
Чтобы узнать, что именно делают эти параметры, наведите мышку на знак вопроса около поля.
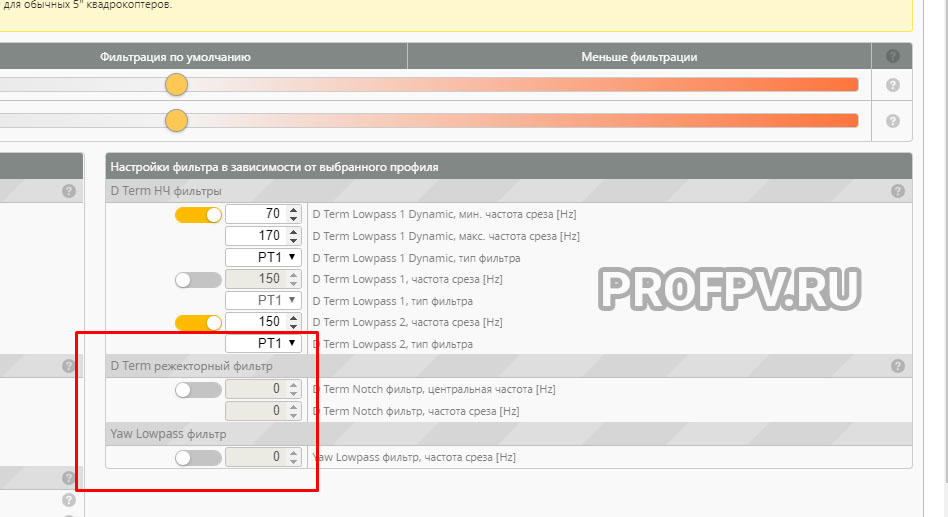
4. Дальше по плану тестовый полет и настройка ползунков фильтров, но сначала убедитесь, что эти переключатели (D Term Notch Filters и Yaw Lowpass Filters) выключены:
5. Теперь вам нужно попробовать полетать на дроне, чтобы убедиться, что он себя ведет адекватно и ничего не «сломалось». Нужно обратить внимание на турбулентность, насколько она сильная и есть ли улучшения. Чтобы ее проверить, поднимитесь повыше и начните свободное падение, выровняйте дрон и дайте частичный или полный газ.
Если турбулентности нет или стало гораздо лучше, можно пропустить то, что написано дальше, а если турбулентность (Propwash) не пропала, то читаем далее.
Не забудьте включить экспертный режим, иначе вы не сможете двигать ползунки на большие значения.
6. Приступаем к настройке через эти ползунки. С их помощью уменьшим количество фильтрации, которая действует на двигатели. Настройка позволит снизить задержку, что приведет к уменьшению вероятности попадания в турбулентность. По умолчанию ползунки выглядят так:
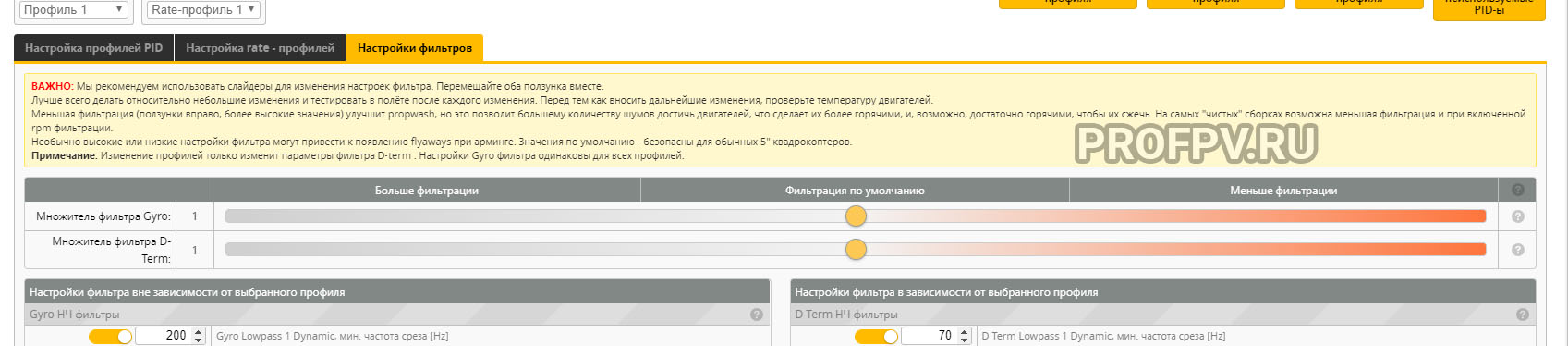
7. Теперь оба этих ползунка сдвигаем в правую сторону (в красную зону) по одному делению за раз. После каждого изменения сохраняетесь и пробуете летать, внимательно следя за температурой двигателей, не греются ли они и конечно же проверяя дрон на турбулентность.
Если двигатели начинают греться так, что вы не можете держать на них палец в течение нескольких секунд, вам придется вернуть ползунки на значение назад. Перегретые двигатели могут легко выйти из строя и даже загореться. Магните в двигателях не переносят высокие длительные температуры и очень быстро начинают деградировать (неодимовые магниты).
Если двигатели теплые, все нормально. Продолжайте двигать ползунки в красную зону и тестировать дрон в полете, пока вы не станете довольны результатом с турбулентностью или пока двигатели не станут слишком горячими.
Вот и все, надеемся, что вам помогла эта инструкция и вы избавились от турбулентности или Propwash! Пишите в комментариях, помогло вам или нет.
