
Если у вас гоночный квадрокоптер, то рано или поздно вы упадете или врежетесь. Со съемочными это сделать сложнее, все-таки скорость маленькая и датчиков больше. Никакая радиоаппаратура управления не идеальна и когда-нибудь даст сбой. Что произойдет, если пропадет связь с квадрокоптером? Сработает функция Failsafe. О функции, что она делает, как работает и о ее настройке вы узнаете ниже.

Что такое Failsafe?
Failsafe — это функция, которая будет управлять вашим квадрокоптером в тот момент, когда вы потеряете с ним радиосвязь. Простыми словами, вы улетели за дом или препятствие, связь оборвалась, но квадрокоптер не полетит дальше, так как у него сработает функция Failsafe, и выполнит действия, которые вы определили в настройках.
Российские пилоты так и называют эту функцию: «фэйлсэйф» или «файлсэйф». Есть еще аббревиатуры: «F/S» и «FS», они означают Failsafe в сокращении. Это полезно знать, если вы ищите ответ на англоязычных ресурсах.

Как работает Failsafe?
Failsafe работает так: вы физически теряете радиосвязь с квадрокоптером, это узнает пульт управления и будет постоянно пытаться восстановить связь. В этот же момент приемник на дроне поймет, что не получает сигнал с пульта управления и сообщит об этом полетному контроллеру. Полетный контроллер моментально обработает эту информацию и запустит функцию Failsafe. Дальнейшие действия зависят от конкретных настроек функции.
Эта функция срабатывает автоматически, но ее можно также настроить на какой-нибудь тумблер и включать принудительно. Например, если у вас есть GPS и вы чувствуете, что теряете управление, лучше включить Failsafe, и дрон сам вернется на то место, откуда он взлетел, главное, чтобы не было препятствий на его пути. Если у вас гоночный, то он просто отключит двигатели и упадет либо будет медленно снижаться.
Зачем нужен Failsafe?
Функция Failsafe предотвращает потерю квадрокоптера. Ваш квадрокоптер не полетит дальше, если потеряется связь — без настройки failsafe дрон летит дальше в том направлении, в котором он летел в момент потери связи.
Как уже говорилось выше, если у вашего дрона есть GPS и барометр, то вы можете настроить ему функцию возврата домой при потере связи, и он должен мягко приземлиться на точку, откуда взлетал. Но это не подходит для гоночных и фристайл-дронов, потому что такие датчики на них не ставят из-за ограниченного веса и места, да и не используются они там. Если вы настроите возврат домой без датчиков, то ничего хорошего не получится, данные брать неоткуда, да и даже простое снижение может нанести повреждения объектам и людям, так как пропеллеры крутятся с огромной скоростью. Летающая мясорубка.
Ниже расскажем, какой режим Failsafe следует настраивать гоночным квадрокоптерам.
Настройка Failsafe в Betaflight
Запустите Betaflight, поставьте галку для включения Режима эксперта (expert mode, в правом верхнем углу). У вас появится вкладка Failsafe.
Перед любыми манипуляциями и настройками квадрокоптера снимайте с него пропеллеры!
Valid Range (Допустимый диапазон)
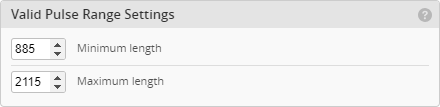
Каждый стандартный радиоканал имеет диапазон от 1000 до 2000. Эти пределы можно делать больше также и через пульт управления, но для гоночных дронов этого делать не рекомендуем. В Valid Pulse Range Settings настраивается значение, как далеко вы должны «выйти» за пределы сигнала, чтобы полетный контроллер включил функцию Failsafe. Простыми словами, насколько слабый должен быть сигнал (а там уже начнутся проблемы с управлением, так как сигнала по факту почти не будет), чтобы сработала функция Failsafe.
В этом блоке значения по умолчанию: 885 и 2115, и их очень редко меняют, или если вы не будете вносить изменения в «end points» в пульте. Советуем не трогать эти цифры, если у вас нет каких-либо проблем с аппаратурой.
Шаг 1
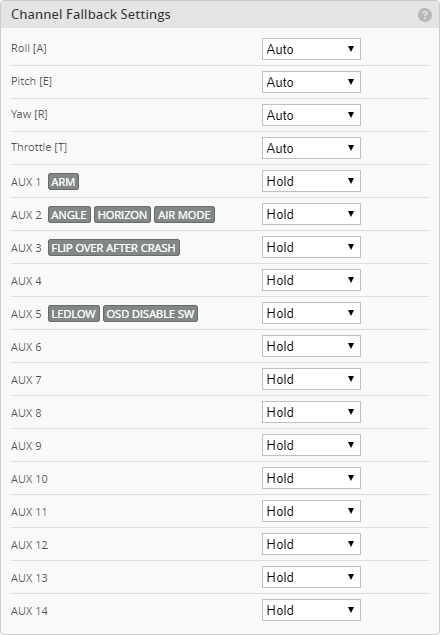
Настройка и работа Failsafe начинается с блока «Channel Fallback Settings«. Здесь у каждого канала указано то, что с ним произойдет после активации функции спасения.
У throttle, pitch, roll и yaw (газ, вправо\влево, вверх\вниз и по своей оси, если вы еще этого не знаете) есть два пункта во вкладке:
- Hold,
- Auto.
Для AUX-каналов (эти каналы вы можете настроить на любой переключатель):
- Hold,
- Set.
Что означают эти слова на практике?
- Hold — это значит, что канал будет удерживать свое положение\позицию как и в момент, когда пропал сигнал.
- Auto — тут есть тонкость:
— Throttle (газ) снизится до минимума (выключится);
— Roll, Pitch и Yaw уйдут в центр (будто стик на пульте будет по центру); - Set — позволит вам выбрать конкретное значение, которое будет использовано, для этого появится текстовая область.
Шаг 1 активен только в течение короткого промежутка времени, это время настраивается на шаге 2. Хорошим временем считается 0.4 сек. Так как это все длится 0.4 секунды, получается, что незачем вмешиваться в настройки блока выше, слишком уж мало времени он будет задействован.
Шаг 1 полезен для вылавливания временных контрольных сигналов, например, если что-то было в качестве препятствия между вами и дроном. Если было препятствие и за это время дрон успел улететь из его зоны (когда сигнал совсем не проходит или крайне слабый), то управление не будет потеряно и дрон продолжит выполнять ваши команды. Это такая буферная зона, чтобы связь успела восстановиться.
Если вы обычно летаете в режимах acro\rate\horizon, то roll, pitch и yaw, следует установить на «Auto». Если дрон вращается в момент срабатывания Failsafe, то значение «Auto» остановит его, а вот со значением «Hold» квадрокоптер продолжит вращаться.
Пилотам, летающим в режиме ANGLE, рекомендуется оставлять значения в Auto, так как Auto будет выравнивать квадрокоптер.
Hold тоже можно использовать в ANGLE, но дрон просто продолжит лететь в том направлении и под тем углом, в каком летел до потери связи.
Для Throttle не прекращаются споры в вопросе, какой метод безопаснее:
- Auto — параметр будет полностью выключать двигатели. Таким образом, предполагается, что пропеллеры никому не смогут навредить при столкновении.
- Hold — пропеллеры будут крутиться с той скоростью, которую вы установите в настройках. Появляется возможность вернуть управление.
Рекомендуем сделать так:
Для Throttle поставить Auto. Для AUX — Hold
Шаг 2
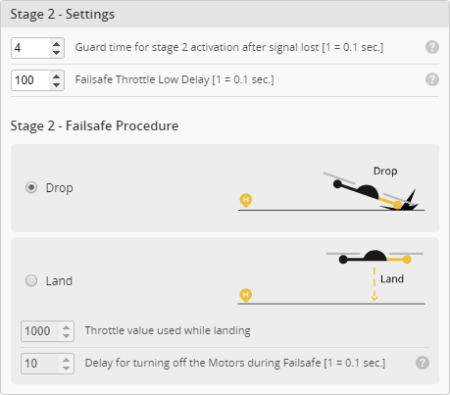
Эти настройки включаются после отработки таймера 1 шага — этот таймер вы настраиваете в Stage 2 — Settings, как на скрине выше, где цифры 4 и 100.
В блоке Stage 2 — Failsafe Procedure вы выбираете, что делать дрону после срабатывания функции спасения — падать или приземляться. В сети очень много споров и мнений по поводу того, какой режим выбрать. Мы заранее рекомендуем — Drop.
Есть два режима того, как приземлиться квадрокоптеру:
- Drop;
- Land.
Что такое Drop — этот режим сразу отключает все двигатели, дрон падает на землю. Или на голову кому-нибудь.
Что такое Land — двигатели начинают вращаться на низких оборотах, а акселерометр начинает выравнивать дрон и происходит посадка. Дрон все также может приземлиться кому-нибудь на голову, но к этому прибавляются еще и крутящиеся пропеллеры. Кроме того, контроллер полета все равно не поймет, когда он коснется земли и двигатели продолжат крутиться с той же силой, и если они заденут пропеллерами ветку/мусор и т.д., то последствия можно представить + могут сломаться не только лопасти, но и сам двигатель.
Вот об этом и споры — что безопаснее. Выбор за вами, но мы рекомендуем Drop.
Для режима Land есть настройка Throttle value used while landing — указывается уровень газа при активации режима. Будьте аккуратны при указывании числа, так как если поставите слишком большие обороты, то дрон вместо посадки улетит по своим делам.
Вторая настройка Delay for turning off the Motors during Failsafe — указывается время, через которое отключатся моторы после активации режима Land функции Failsafe. 1 = 0.1 секунды.
Тестирование и нюансы Failsafe
Тестирование следует проводить только в поле, вдали от людей, линий электропередач и прочих объектов.
При тестировании используйте заряженные аккумуляторы, например 4S, так как в зависимости от уровня заряда будет меняться и тяга. Значение 1500 будет разным при использовании только что заряженного и уже разряженного. Почему заряженный? Если на разряженном он у вас медленно приземляется, то при заряженном, скорее всего, наоборот, будет подниматься выше.
Вам также стоит знать один нюанс: после автоматического срабатывания Failsafe включается проверка безопасности полетного контроллера и вам не удастся снова заармить дрон, пока не пройдет 30 секунд после восстановления связи. Простыми словами — вы залетели за дом, сработал Failsafe, дрон упал, вы побежали за ним, пульт и приемник «увидели» друг друга, связь восстановилась, но вот беда — дрон не запускается. Тут многие начинают искать проблему, думают, что что-то сломалось, а на самом деле просто нужно подождать 30 сек. и попробовать заармить его снова.
Если вы включаете Failsafe руками через тумблер, то у вас есть 3 секунды, чтобы отключить режим спасения и вернуть управление в свои руки — если не успели, то дрон будет завершать свой сценарий спасения самостоятельно.
Во время выполнения шага 1 и 2 вы все еще можете перехватить управление! НО, если выбран режим Drop — у вас этого времени почти не будет, зато это безопаснее. В режиме Land у вас будет столько времени, сколько вы указали в Delay for turning off the Motors during Failsafe
Еще один нюанс: как только приемник «поймает» сигнал с пульта, он моментально передаст значения с пульта в полетный контроллер, то есть это все произойдет без предупреждения и дрон сразу «газанет» вверх/вбок/вниз и так далее. Достаточно непредсказуемый этот режим Land. Можно еще сильнее ухудшить ситуацию, поэтому еще один голос в пользу Drop.
Как установить Failsafe на тумблер/переключатель

Назначить функцию спасения на тумблер очень просто. Заходите в Betaflight во вкладку Modes и делаете примерно так, как на скрине выше, то есть ищите FAILSAFE и назначаете любой свободный тумблер, а ползунками выбираете промежуток для активации функции.
Также после назначения нужно выбрать, на какой шаг вы сразу перейдете после активации функции тумблером:

Настройка Failsafe на аппаратуре управления (на пульте)
У каждой аппаратуры управления есть возможность настроить собственную систему Failsafe. Лишняя подстраховка не помешает, потому что в зависимости от настроек аппаратуры управления полетный контроллер может не понять, что связь потеряна.
Читайте также: Аппаратура управления квадрокоптером, какая бывает и как выбрать
FrSky
Приемники FrSky (то, что вы ставите в дрон) получают настройки Failsafe из пульта управления.
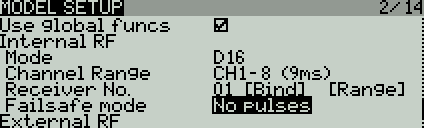
Вам нужно зайти в меню модели, далее на странице Model Setup перейдите к настройке “Failsafe” или “Failsafe mode”. Здесь вы можете выбрать, что делать после потери сигнала:
- No pulses — все каналы на 0 (выключаются).
- Receiver — управление передается приемнику, то есть сработают настройки, заложенные в приемник.
- Custom — позволяет вам задать собственные настройки каждому каналу.
- Hold — удержание всех позиций каналов со значениями на момент потери сигнала на неопределенное время.
- Not set — все каналы на 0, но пользователь предупреждается, что он сознательно не настроил режим срабатывания Failsafe.

На многих приемниках FrSky есть кнопка для настройки Failsafe, прочитайте инструкцию для вашего приемника по использованию этой кнопки.
Читайте также: Настройка FailSafe в Taranis и Betaflight
Spektrum
У спектрумов Failsafe настраивается в момент привязки приемник-передатчик. Установите на пульте стик газа на 0, а правый стик в середину, затем выполните процедуру привязки. При необходимости «развяжите» их и выполните действие еще раз.
FlySky
Настройка Failsafe у флайскай немного мудреная, тут не ограничиться одним абзацем, поэтому почитайте информацию в нашей другой статье: https://profpv.ru/как-настроить-и-установить-flysky-fs-ia6b/
Заключение
После настройки Failsafe вам останется включить пищалку (зуммер) при активации функции спасения. Включить пищалку можно во вкладке Configuration в Betaflight, строчка называется RX_LOST. Пищалка поможет быстро найти ваш дрон в траве или на местности, так как писк будет сильным и громким.
Если у вас нет зуммера (пищалки), но используется протокол DShot, то вы можете настроить регуляторы оборотов, чтобы они начали пищать моторами. Это тоже делается во вкладке Конфигурация в Бетафлайт.
Говорят, что таким способом вы перегреете двигатели, но мы протестировали в течение часа такой способ и моторы не перегрелись. Второй тест — зажали моторы и испытывали в течение получаса, моторы тоже не перегрелись. В любом случае лучше потерять 1-2 мотора, чем весь квадрокоптер.
Всегда настраивайте Failsafe!
