
 Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетные контроллеры делятся на 3 группы:
- Гоночные полетные контроллеры
- Контроллеры для съемки видео и фото с дрона
- Контроллеры для автономных полетов
Каждый контроллер имеет свое программное обеспечение, которое управляет всем оборудованием. Самые популярные контроллеры можно прошивать и гибко настраивать с помощью специальных программ, таких как CleanFlight, Betaflight и Raceflight.
- Какие бывают полетные контроллеры?
- Гоночные полетные контроллеры
- Контроллеры для съемки видео и фото с дрона
- Контроллеры для автономных полетов
- Прошивки полетного контроллера, их виды
- Процессор полетного контроллера
- Гироскоп и акселерометр полетного контроллера
- Выбор гироскопа: частота опроса и шумы
- i2c и SPI
- Порт UART в полетном контроллере
- Сколько бывает портов UART на полетном контроллере?
- Инвентированный сигнал и UART
- Размеры платы полетного контроллера
- Какие есть дополнительные функции в полетном контроллере?
- OSD
- Плата разводки питания (PDB)
- Датчик тока (Current Sensor)
- Регуляторы оборотов (ESC)
- Черный ящик (Blackbox)
- Типы коннекторов
- Регулятор напряжения (BEC)
- Светодиод состояния
- Кнопка для перехода в режим прошивки
- Какие еще бывают функции в полетном контроллере?
- Заключение
- Рекомендованный список новых полетных контроллеров, соответствующих современным требованиям
Какие бывают полетные контроллеры?
Ниже рассмотрим вопрос — какие бывают полетные контроллеры, а точнее, для каких целей.
Гоночные полетные контроллеры
 Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Naze32, также на базе этого контроллера есть SP Racing F3:
На нем присутствуют все стандартные датчики – гироскоп и акселерометр, а в расширенной версии DELUXE также есть барометр и компас.
Гироскоп и акселерометр определяют текущее расположение дрона в пространстве. Барометр определяет высоту по давлению (чтобы удерживать высоту, например), компас для удержания направления полета.
На сегодня, полетные контроллеры серии F4 являются самыми популярными полетными контроллерами для мини и гоночных квадрокоптеров, так как прекрасно работают с такими программами, как CleanFlight, Betaflight и Raceflight. На их смену уже выходит серия F7, становясь все более популярной.
Разработка прошивок для полетного контроллера F3 уже прекратилась из-за ограничения ресурсов, поэтому выбирайте для покупки F4 или F7:
Betaflight прекращает разработку ПО для полетных контроллеров F3 c STM32F3
Также еще два популярных контроллера:
KISS – прошивать своей прошивкой нельзя. Имеет графический интерфейс с минимумом настроек.
LUX – такой же гибкий, как Naze32, но все же уступает ему. Прошивать можно.
Контроллеры для съемки видео и фото с дрона
 Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Поддерживает весь набор датчиков (GPS, телеметрию, OSD и т.д.)
ArduPilot AMP поддерживает GPS и автономный полет по заданным координатам. Тоже достаточно популярный контроллер, но стоит дороже обычных из-за наличия более важных датчиков.
Vector Flight Controller- профессиональный полетный контроллер с встроенной системой Eagle Tree.
Новичок тоже сможет на таком летать. Эти контроллеры стоят дорого, а вес и размер стремятся к идеалу для аэросъемки.
Контроллеры для автономных полетов
3DR Pixhawk — самый популярный контроллер для автономных полетов. На его борту есть резервная система, а также он поддерживает все известные датчики для дронов.
MultiWii Pro — дешевый и доступный, позволяет отлично стабилизировать коптер, также на нем есть барометр, магнитометр и GPS.
Теперь, после краткого обзора типов полетных контроллеров, перейдем к полному описанию.
Прошивки полетного контроллера, их виды
Полетные контроллеры отличаются не только по типу компонентов, из которых они состоят, но и по прошивкам, на которых они работают, то есть программным обеспечением, на котором работает полетный контроллер.
Как уже написано выше, на сегодня самыми популярными прошивками являются:
- CleanFlight;
- Betaflight;
- Raceflight.
Что из себя представляет программное обеспечение полетного контроллера — прошивка? Это набор правил и алгоритмов, которые обрабатывает процессор.
А теперь ответ на вопрос, как прошить полетный контроллер? Конкретно для каждой прошивки разработан свой конфигуратор — это специальная программа, которая загружает в полетный контроллер программное обеспечение, а зачем конфигуратор работает в роли графического интерфейса прошивки — чтобы вам было наглядно и удобно настраивать свой квадрокоптер.
Читайте также: Betaflight configurator, настройка на русском
С помощью графического интерфейса можно вносить различные настройки в прошивку, например, менять параметры PID, включать и редактировать фильтры, включать или отключать датчики, настраивать начальные и максимальные обороты двигателей и так далее. Но стоит отметить, что в зависимости от прошивки у них будет разный интерфейс, критичных отличий, конечно, не будет, но все же.
Процессор полетного контроллера
От процессора будет зависеть то, насколько быстро будут обрабатываться поступающие к нему данные. Процессоры делятся по поколениям: F1, F3, F4, F6. Вот такие странные поколения, где пропущены 2-е и 6-е поколения. Отличаются они частотой работы и архитектурой:
- F1 — 72MHz;
- F3 — 72MHz;
- F4 — 168MHz;
- F7 — 216MHz.
Сейчас все новые полетные контроллеры поставляются с процессором 7-го поколения, так как обрабатывать фильтры и PID становится все труднее, прогресс шагает километровыми шагами в этой сфере. Но у многих пилотов ПК на процессорах 3-го поколения, так как F3 был самым (да и остается) массовым поколением со стабильной работой.
Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные датчики, они определяют положение квадрокоптера в пространстве, а также движется ли он, посылают эти данные процессору, а тот уже решает, какому двигателю поддать газа, а какому наоборот, снизить обороты.
Акселерометр выполняет роль стабилизатора в пространстве, есть даже такой режим полета — «Режим стабилизации», при котором квадрокоптер невозможно будет перевернуть в воздухе и он всегда будет держаться параллельно земле (если просто отпустить стики на пульте). Опытные пилоты почти всегда летают в режиме АКРО, поэтому они отключают акселерометр или используют его крайне редко.
Гироскоп же выполняет роль определения положения квадрокоптера в пространстве.
Какие самые популярные гироскопы используются в полетных контроллерах? Смотрим таблицу ниже:
| Гироскоп | Протокол коммуникации (BUS) | Макс. частота работы гироскопа |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 и тоже с магнитометром.
Номер и название гироскопа можно найти на самом чипе, например это — MPU-6000:

Выбор гироскопа: частота опроса и шумы
Есть два критерия, которые нужно учитывать при выборе полетного контроллера с конкретным гироскопом, это частота работы и чувствительность к шумам (электро- и механическим).
На сегодня самыми популярными и надежными считаются гироскопы MPU6000, у них частота работы 8KHz, а также они достаточно не чувствительны к шумам. Советуем не покупать полетные контроллеры с гироскопами MPU6500 и MPU9250, у них хоть и частота выше, но они больше подвержены воздействию шумов.
Серия гироскопов ICM работает лучше и плавнее, чем MPU6000 на 32KHz, но из-за шумных двигателей и регуляторов оборотов производительность ICM будет ниже, чем MPU6000. Например, ICM20602 на Raceflight Revolt V2 или ICM20689 на Kakute F4, оба этих гироскопа могут работать на частоте 32KHz, но с регуляторами оборотов, которые генерируют много шума, они работать будут хуже, чем MPU6000. По этой причине на полетные контроллеры устанавливают сетевые фильтры для частичного удаления шумов.
Чтобы частично убрать механические шумы (вибрацию), полетный контроллер следует устанавливать на резиновые подушки или любой другой пористый материал, который сможет гасить вибрацию, например кусок резины или вспененного материала.

i2c и SPI
SPI и i2c — это протоколы связи (BUS) между процессором и гироскопом . В зависимости от того, какой будет протокол, будет зависеть скорость работы самого гироскопа. Гироскоп сможет работать на частоте 32KHz с протоколом SPI, в то время как на i2c можно рассчитывать на «потолок» в 4 KHz. Поэтому выбирайте ПК с SPI.
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
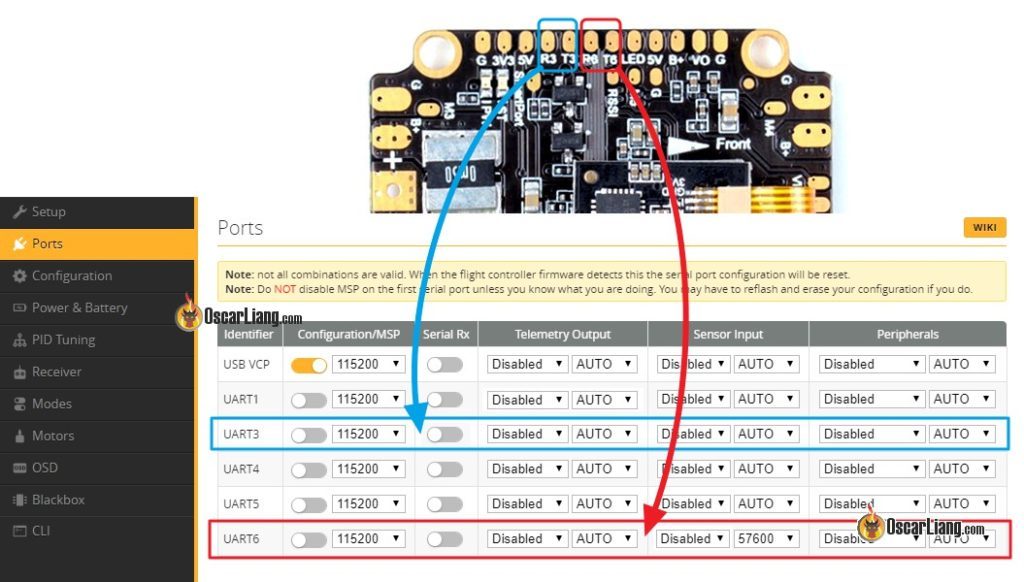
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:
Сколько бывает портов UART на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7+ UART |
Инвентированный сигнал и UART
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет. Также стоит отметить, что такой порт будет работать значительно медленнее, чем физический и он не подойдет для подключения приемника, например, так как такое замедление критично. Процессор тоже будет работать с повышенной нагрузкой.
Размеры платы полетного контроллера
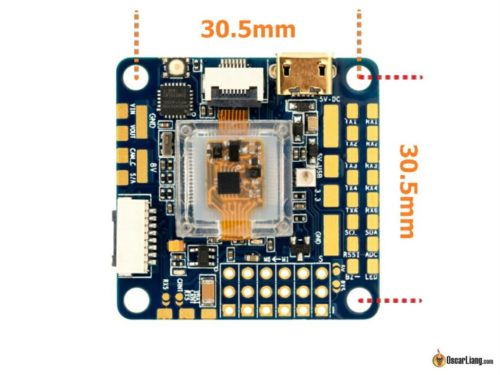
Монтажная схема полетного контроллера — это расстояние между отверстиями для крепления ПК к раме дрона. В этом вопросе есть стандарт, который состоит из 3 схем:
- 30,5 × 30,5 мм,
- 20 × 20 мм,
- 16 × 16 мм.
Размер платы соответствует размеру дрона, который вы будете собирать, например, 30,5 х 30,5 мм устанавливаются в рамы размером от 200 мм и больше, а на меньшие рамы устанавливаются последующие размеры полетных контроллеров.
Какие есть дополнительные функции в полетном контроллере?
OSD
OSD — это очень важная и нужная функция. OSD накладывает на видеопоток дополнительную информацию с различных датчиков квадрокоптера, например, напряжение аккумулятора, высота, скорость и так далее. Любой, кто сталкивался с minimOSD, знает, какая трудность — подключить и настроить эту плату, да и мало подключить, ее еще нужно программатором прошить, и только после этого плату OSD можно будет настраивать в Betaflight.
Поэтому делайте выбор в пользу полетных контроллеров с встроенным OSD, это сбережет вам нервы и время.
Плата разводки питания (PDB)
К плате разводки питания подключаются аккумулятор и двигатели с регуляторами оборотов, а также полетный контроллер и прочая периферия. У некоторых ПК такая плата уже есть, они совмещены. Это, конечно, плюс, но где плюсы, там и минусы — в такой компоновке будет мало места, и в случае поломки ее будет сложнее устранять.
Читайте также: Что такое PDB? Для чего это нужно и как работает?
Датчик тока (Current Sensor)
На плате разводки обычно есть контакты VBAT, куда подключаются контакты полетного контроллера и ПК снимает данные о текущем напряжении, но свой собственный датчик тока эффективнее.
Регуляторы оборотов (ESC)
Наверняка вы уже слышали или видели регуляторы оборотов 4 в 1, такая квадратная плата вместо 4 плат. Инженеры решили интегрировать регуляторы сразу в полетный контроллер и теперь, если вы купите такой ПК, вам можно будет припаять двигатели напрямую к ПК. О целесообразности такого выбора решать только вам.
Читайте также: ESC регуляторы оборотов, что это, как они работают и как выбрать
Черный ящик (Blackbox)
Черный ящик нужен для записи логов работы квадрокоптера, туда записываются всевозможные данные, которые обрабатывает полетный контроллер. Есть два места, куда можно вести запись логов, это флеш-память полетного контроллера и SD-карта (флешка).
Плюсы встроенной флеш-памяти:
- Экономия места,
- Не нужен отдельный разъем.
Минусы встроенной флеш-памяти:
- Маленький размер хранилища,
- Маленькая скорость обмена данными (скачивание логов).
Плюсы SD-карты:
- Большой объем хранилища,
- Большая скорость обмена данными,
- Возможность подключить флешку к другому источнику считывания информации,
- В случае поломки легко заменить.
Минусы SD-карты:
- Объективных минусов не обнаружено.
Типы коннекторов
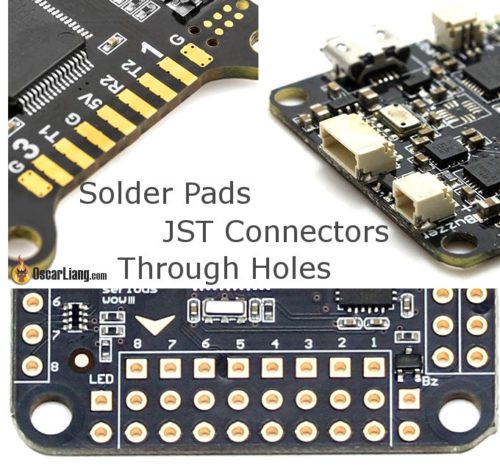
Это, конечно, не функция, но не рассказать об этом нельзя. На полетном контроллере есть 3 типа соединений между периферией:
- Пластиковые коннекторы
- Контактные площадки для припаивания
- Отверстия для припаивания
Пластиковые коннекторы в основном используются для подключения периферии, которую иногда нужно отключать и снимать, в этом их плюс — быстро снять/подключить. Они не очень прочные, но удобные.
Контактные площадки для припаивания удобны в использовании, но если контакт сильно нагреется во время использования, то есть вероятность, что он оторвется. То же самое и в вопросе о разрыве при сильном натяжении.
Отверстия для припаивания удобны тем, что провод гораздо прочнее будет «сидеть» в пазу. Также можно использовать угловые штифты для более удобного подключения периферии.
Регулятор напряжения (BEC)
На современных (да и не только) ПК есть отдельные контакты для подключения источника потребления на 5V и на 12V, иногда встречаются даже на 9. Хоть сейчас почти все FPV-компоненты рассчитаны на ток в широком диапазоне и их можно подключать даже к аккумулятору, мы все же рекомендуем подключать их к отдельному входу на полетном контроллере, где ток подается стабильным, тогда как в аккумуляторе он будет постоянно «скакать» от нагрузки.
Светодиод состояния
Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно у светодиода есть 2 цвета — красный и синий. В зависимости от того, каким и сколько раз мигает ПК — пилот понимает, все ли в порядке. Эта спецификация всегда указывается с конкретным контроллером.
Кнопка для перехода в режим прошивки
Без такой кнопки не обойтись ни одному полетному контроллеру. Для прошивки замыкают 2 контакта, затем подключают к компьютеру и запускают Betaflight конфигуратор или любой другой. Есть два типа:
- С кнопкой
- Без кнопки
С кнопкой удобнее — нажал отверткой и все, а вот для контактов нужно использовать пинцет или скрепку, чтобы закоротить их.
Какие еще бывают функции в полетном контроллере?
- Встроенный видеопередатчик. Это экономия места и веса, а также возможность настраивать видео прямо из полетного контроллера.
- Барометр и Компас. Нужны для полета по курсу и зависания на одной высоте с определением этой высоты. Не нужны гоночным дронам.
- Поддерживаемый протокол связи полетный контроллер=приемник: при покупке обратите внимание, какие протоколы будет поддерживать ваш ПК — PWM, PPM, SBUS, Spektrum Satellite и другие. (Подробнее о протоколах: https://profpv.ru/протоколы-pwm-ppm-sbus-dsm2-dsmx-sumd-что-это-работае/)
- AIO. Означает, что * в 1, где * — любое число. Например, 6 в 1 — это 4 регулятора оборотов, сам полетный контроллер и плата разводки, и все это в одной плате. Единственный минус — если что-то сломается, скорее всего, придется менять всю плату.
- Поддержка инфракрасного транспондера. Нужен для гонок, чтобы засчитывать время круга, проходя контрольные точки.
Заключение
Как вы заметили, полетный контроллер — это очень важный узел в квадрокоптере и занимает очень много места в теории. И на вопрос, как правильно выбрать полетный контроллер, у вас не должно оставаться этих самых вопросов, а если остались, вы должны понять, для чего вам нужен квадрокоптер, для каких нужд. Если для гонок и драйва, то одни контроллеры, если для съемки, то другие. Также стоит учитывать ваши навыки, если вы новичок, то не стоит брать дорогие контроллеры с кучей датчиков или наоборот те, в которых абсолютно ничего не настроено и даже нет прошивки.
Также стоит учитывать бюджет, который вы можете потратить, так как цены очень сильно разнятся. Например, SP Racing F7 с OSD для гоночных дронов стоит от 1600 до 2500 рублей, а вот DJI A3 для профессиональной фото- и видеосъемки стоит 50 000 – 60 000 тысяч рублей.
Подведем итоги:
Выбирать полетный контроллер следует из ваших потребностей – для гонок, для съемки или для автономных полетов, а также, а также, на основе статьи, что написана выше.
Рекомендованный список новых полетных контроллеров, соответствующих современным требованиям
- Omnibus FC: — Яндекс.Маркет* | Яндекс.Маркет*
- Diatone MAMBA F405 c ESC — Яндекс.Маркет* | Яндекс.Маркет*
- Holybro Kakute F7 AIO — Яндекс.Маркет* | Яндекс.Маркет*
- Omninxt F7 airbot — Яндекс.Маркет* | Яндекс.Маркет*
- Hobbywing F4 4 в 1 (с регуляторами оборотов) — Яндекс.Маркет* | Яндекс.Маркет*
- Racerstar Star F4 c встроенными регуляторами оборотов — Яндекс.Маркет* | Яндекс.Маркет*
- DYS F4 PRO V — Яндекс.Маркет* | Яндекс.Маркет*
Читайте также: Полный справочник (FAQ) о гоночных квадрокоптерах: с чего начать и как летать
* — Реклама. ООО «ЯНДЕКС», ИНН 7736207543, erid: 5jtCeReNx12oajt54cs8okg

Добрый день, хочу собрать гоночный квадрокоптер 250 мм. Опыта в сборке нет, в полётах есть немного, на симуляторе полётов и на mjx bugs 3. И з деталей имею: RS2205 2205 2300KV CW CCW бесщеточный двигатель + LittleBee 30A blheli _ s регуляторы оборотов, аппаратура frysky Taranis x9 lite, определюсь с выбором рамы. Подскажите, какой мне подобрать контроллер с функциями, которые на первое время позволят не угробить моего первенца и аккумулятор?
Хочу собрать квадрокоптер, который будет снимать фото( Камера — MP OV5647), но на будущее планируется, чтобы он еще и автономно летал. Можно ли как то скомпоновать полетный контроллер для фото и автономного полета?P.S. я еще новичок в этом деле

проще купить дрон фирмы DJI, а так под вашу задачу нужно сесть и подумать, потому что готовых решений нет, да и прошивки betaflight такое не поддерживают.
Не поможете найти инструкцию к succex e-f405? Не могу найти описание моргания диодов
Если прошит Betaflight прошивкой, то смотрите тут: https://profpv.ru/ne-zapuskaetsya-kvadrokopter-ispravl/
Смотрите на Arming Disable Flag — в этом поле все ошибки пишутся.