Все началось с того, что нам очень понравилась FPV камера Caddx Tarsier 4K из-за принципа 2 в 1, так как не надо будет лепить экшен-камеры на раму квадрокоптера. Поэтому, было решено собрать квадрокоптер вместе с этой камерой, хоть она и предназначена для микро-квадрокоптеров.
Далее в статье мы объясним, каким образом была закреплена плата и сама камера в раме. Пошаговая сборка квадрокоптера своими руками под силу любому, кому интересна эта тема, в статье все рассказываем максимально подробно.
- Что нужно для сборки квадрокоптера? Инструменты
- Вступление
- Электроника квадрокоптера и другие компоненты
- Сборка квадрокоптера. Собираем дрон своими руками
- Схема монтажа
- Сборка рамы
- Подключение моторов квадрокоптера: установка двигателей
- Установка полетного контроллера
- Монтаж проводов для камеры
- Монтаж приемника
- Установка видеопередатчика и пищалки
- Монтаж Caddx Tarsier 4K в стэк, в башню
- Последние штрихи
- Прошивка и настройка квадрокоптера после сборки своими руками
- Прошивка регуляторов оборотов в BLHeliSuite
- Прошиваем полетный контроллер в Betaflight Configurator
- Вкладка Система
- Вкладка Порты
- Вкладка Конфигурация
- Вкладка Питание и батарея
- Вкладка Приемник
- Вкладка Режимы
- Вкладка Моторы
- Вкладка OSD
- Вкладка Командная строка (CLI)
- Фотографии
- Таблица компонентов и примерная цена
- Заключение
Что нужно для сборки квадрокоптера? Инструменты
Набор инструментов стандартный, но без него у вас не получится собрать квадрокоптер. И так, вам потребуется следующий инструмент для пошаговой сборки квадрокоптера:
- Паяльник;
- Припой 63/37;
- Флюс активный или нейтральный (я использую ФИМ, активный, но активный флюс надо обязательно хорошо смывать, иначе будет разъедать контакты);
- Пинцет;
- Ключи под шестигранники и головка для гаек;
- Канцелярский нож или любой инструмент для обрезки проводов и снятия изоляции;
- Термоусадка;
- Зажигалка;
- Линейка или рулетка;
- Пластиковые стяжки;
- Фиксатор резьбы синий (можно использовать и красный, но в малых количествах);
- Мультиметр для прозвонки цепи на случай короткого замыкания.

Что еще понадобится именно для этой сборки:
- Набор винтов и гаек для закрепления платы камеры (ссылка на набор в таблице в конце статьи);

- Распечатанные на 3D принтере переходники для камеры с микро размера, на мини. Либо можете купить простой адаптер с микро, на мини, но я по определенным причинам выбрал вариант с распечаткой 3D принтером.

Готовый переходник (ссылка будет в таблице):

Ссылка на модельки переходника: https://www.thingiverse.com/thing:3958854
Вступление
Когда вышла эта камера, очень уж захотелось применить ее в обычном мини квадрокоптере, хотя предназначена они для микро дронов. Основной причиной выбора была компактность, качество видео и экономия места, потому что больше не нужно будет навешивать экшен-камеры на дрон и производить лишние манипуляции. Плюсом будет и то, что к камере можно подключаться по Wi-Fi (она создает свою точку доступа) и скачивать видео на телефон, смотреть видео с камеры в реальном времени (хоть и с задержкой), а также производить настройки.
Ну и конечно же, это камера умеет записывать видео, при этом, наверху дрона ничего не будет торчать.
Не забывайте, что пошаговая сборка квадрокоптера это творчество и не обязательно следовать инструкциям и делать так, как показано в статье. Вы можете включить фантазию и сделать иначе или вообще этого не делать. Это хобби, которое должно приносить удовольствие от конструирования, настройки — пользуйтесь этим и не ставьте себе рамки/ограничения.
Читайте также: Caddx Tarsier 4K — FPV камера с топовым разрешением и двумя объективами
Электроника квадрокоптера и другие компоненты
Инструменты перечислили, теперь нужно перечислить и компоненты, из которых собирается квадрокоптер:
- Рама;
- FPV камера (в нашем случае, а это Caddx Tarsier);
- Полетный контроллер с регуляторами оборотов 4 в 1 (там же и плата распределения питания);
- Видеопередатчик;
- Приемник;
- Аккумулятор;
- Антенна для видеопередатчика;
- Крепления для аккумулятора.
Все ссылки на компоненты вы найдете в конце статьи в виде таблицы.
Сборка квадрокоптера. Собираем дрон своими руками
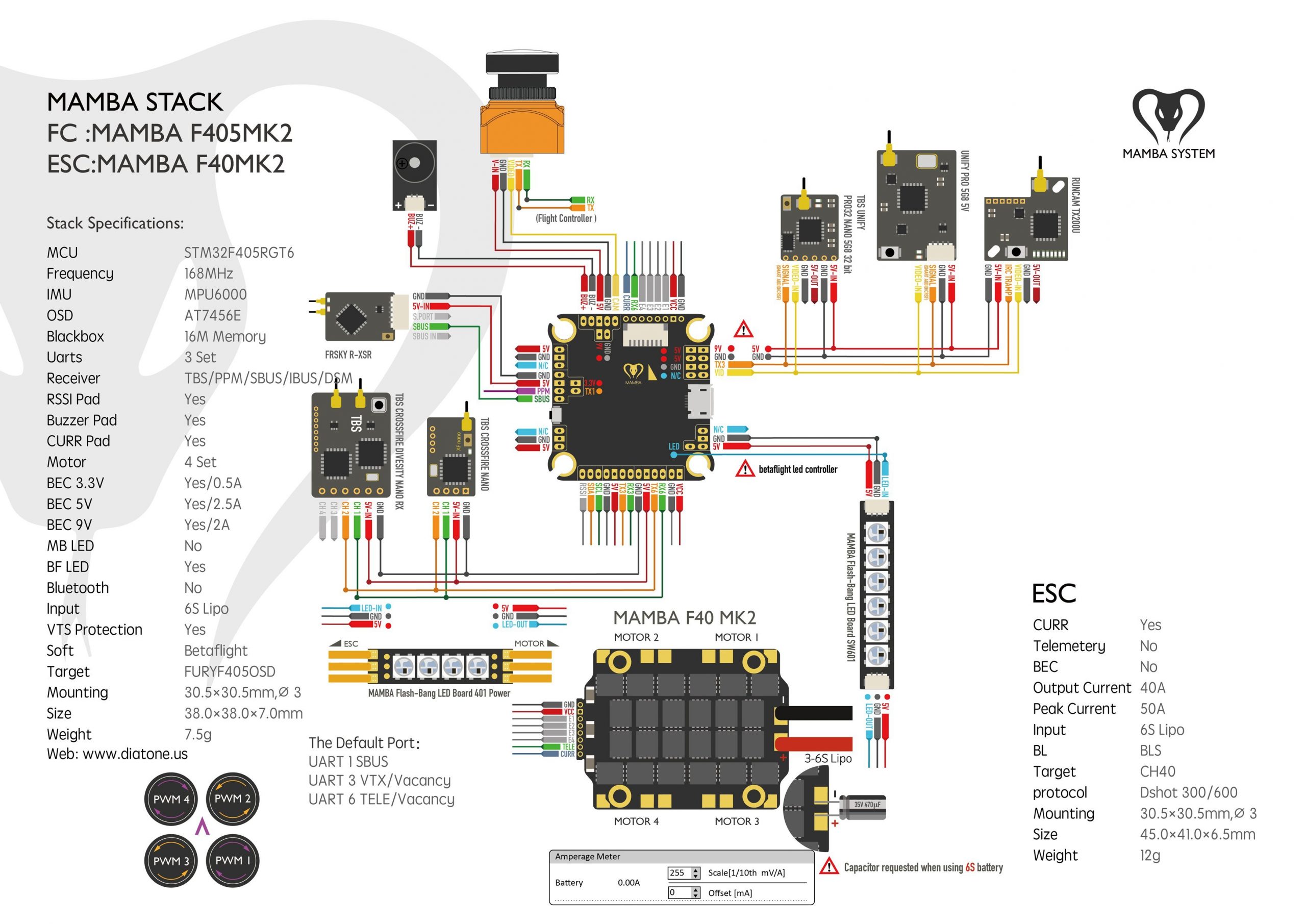
Схема монтажа
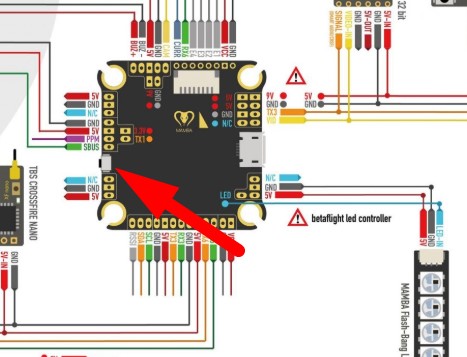
Подключать все компоненты будет согласно этой схемы:
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:

Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.




Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами

Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:

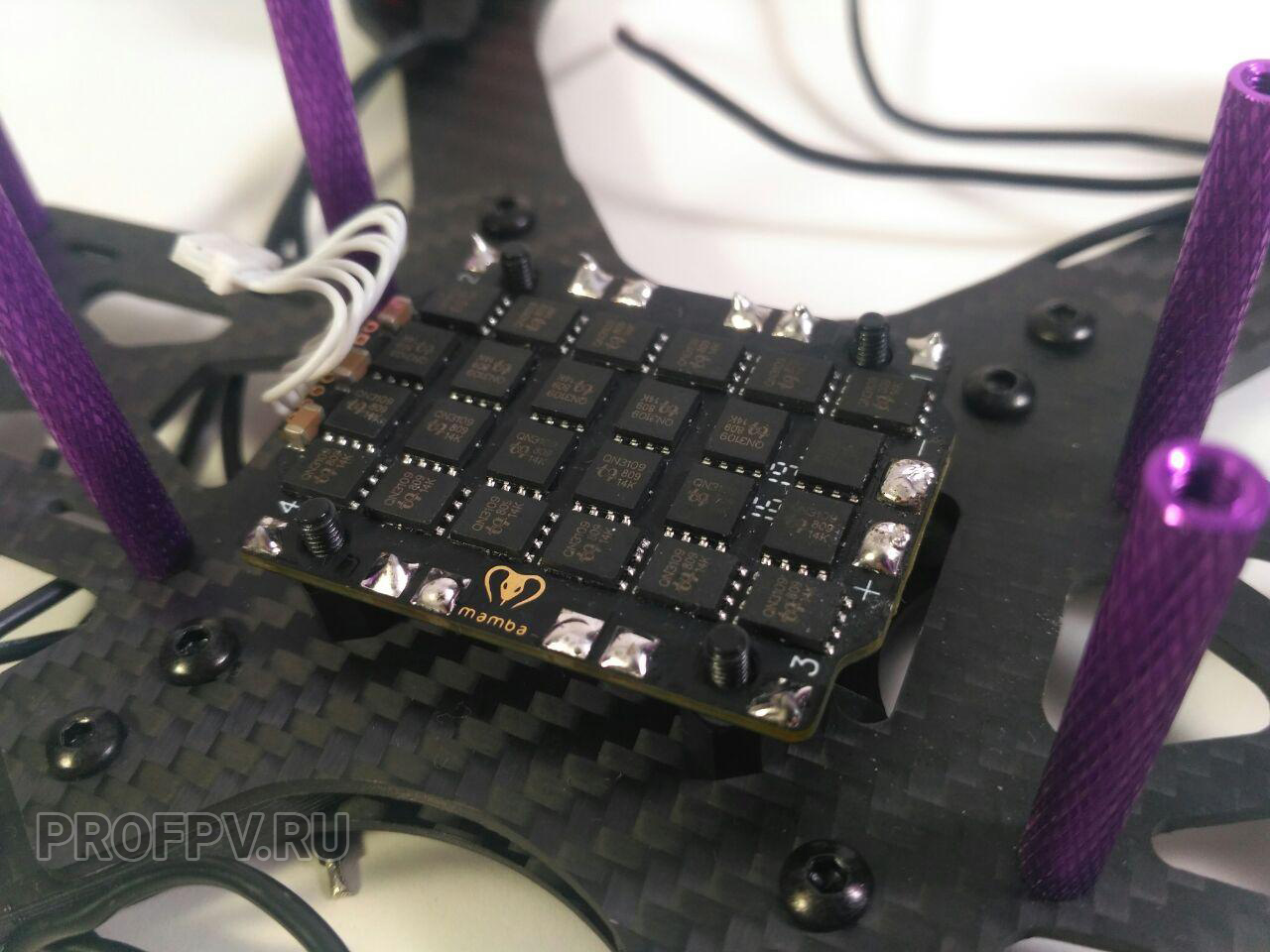
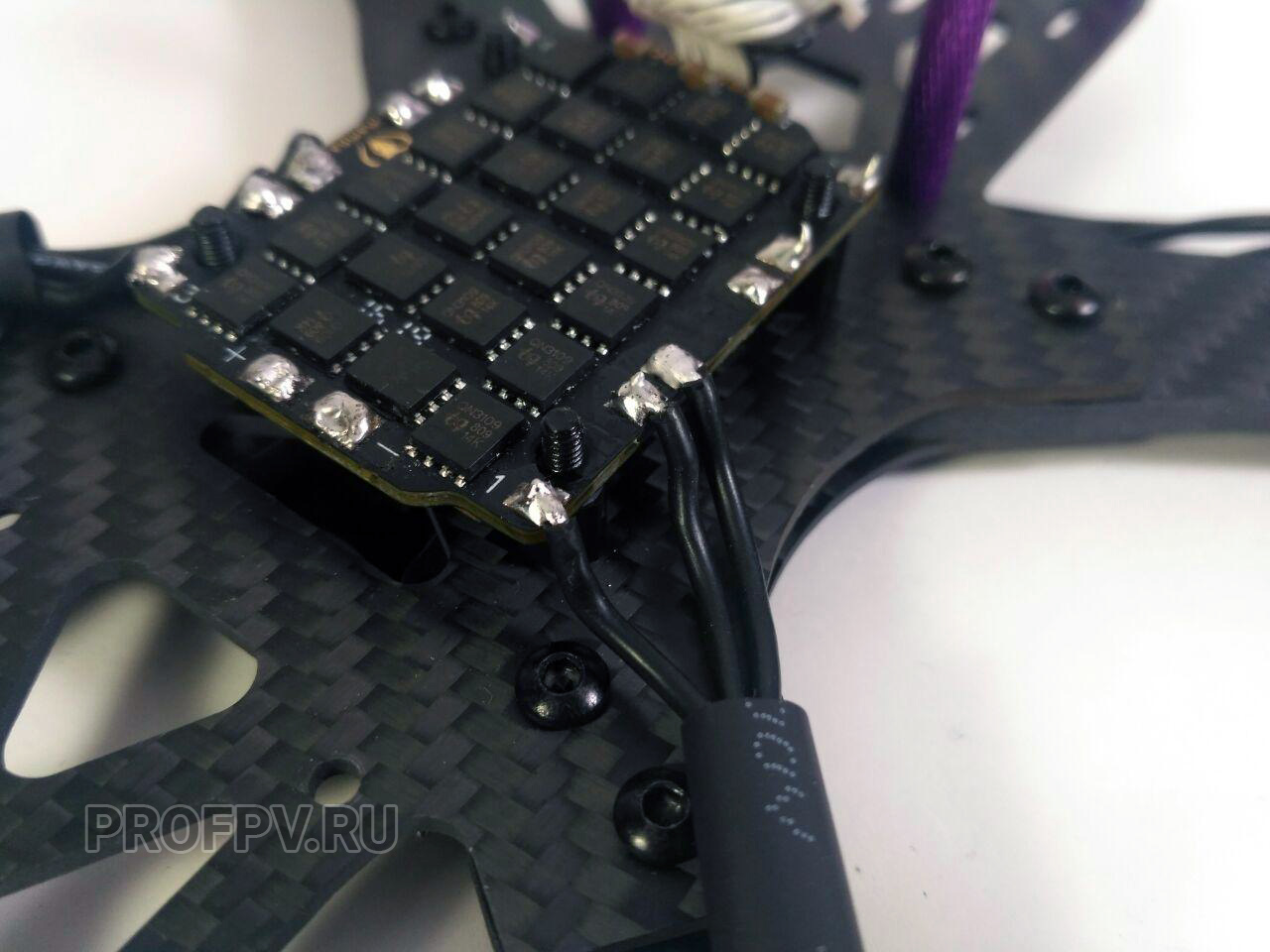
Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону. Но это совсем не проблема, так как используются контр-гайки, которые и так не будут откручиваться. Плюсом к этому будут минимальные допуски — пропеллеры садятся туго и держатся крепко даже без гаек.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:

А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:

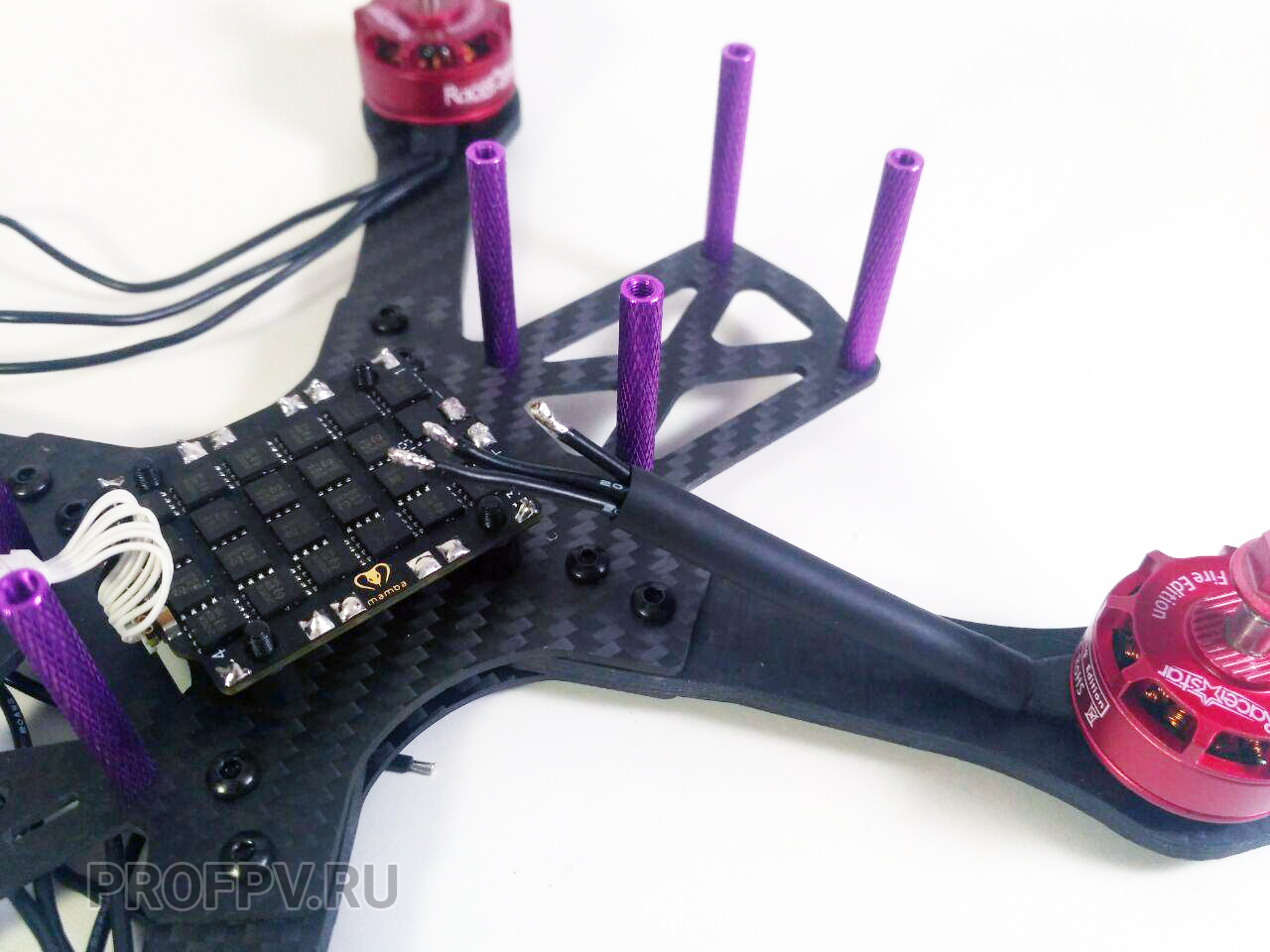
Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.

После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
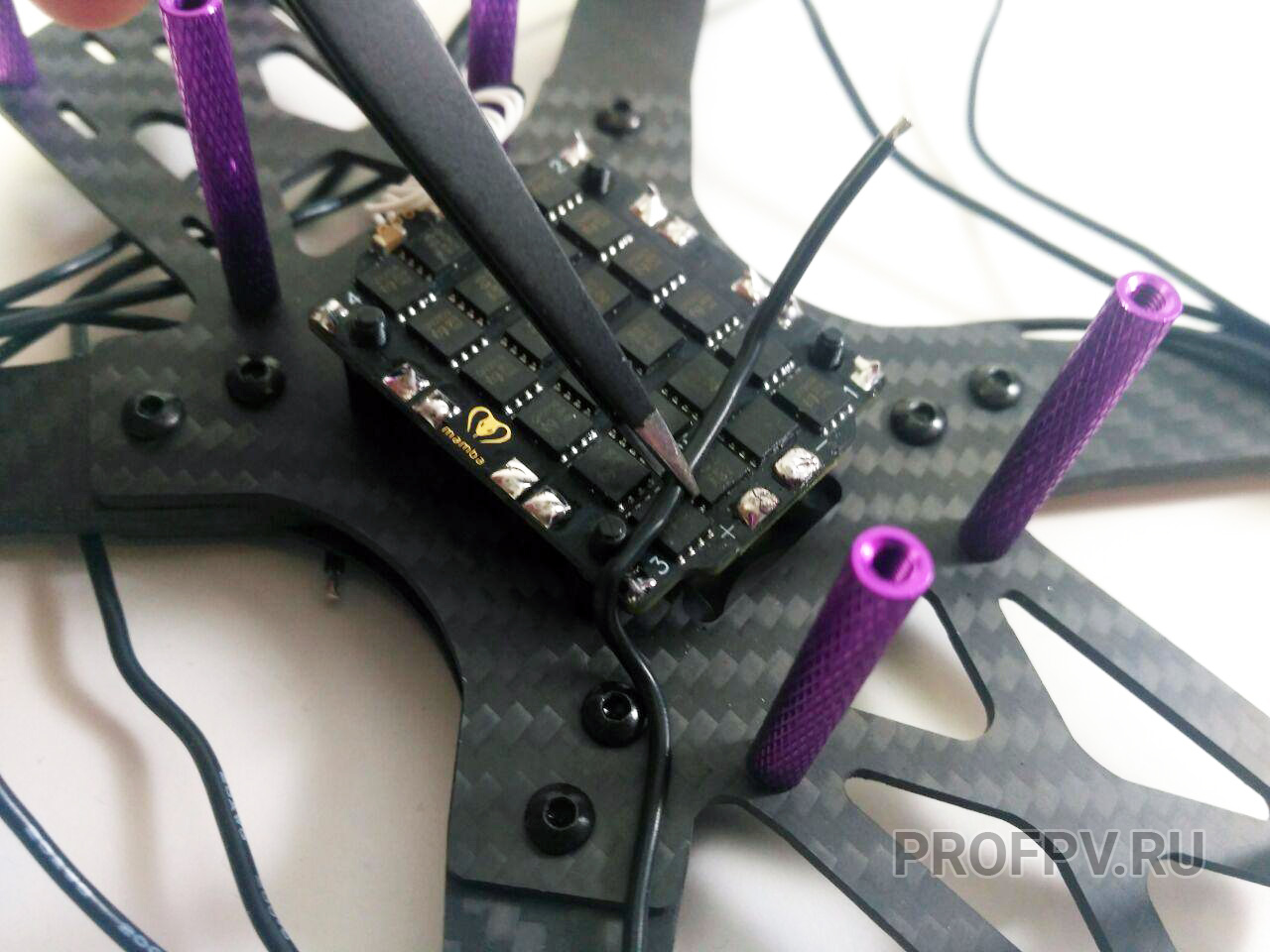
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):



Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
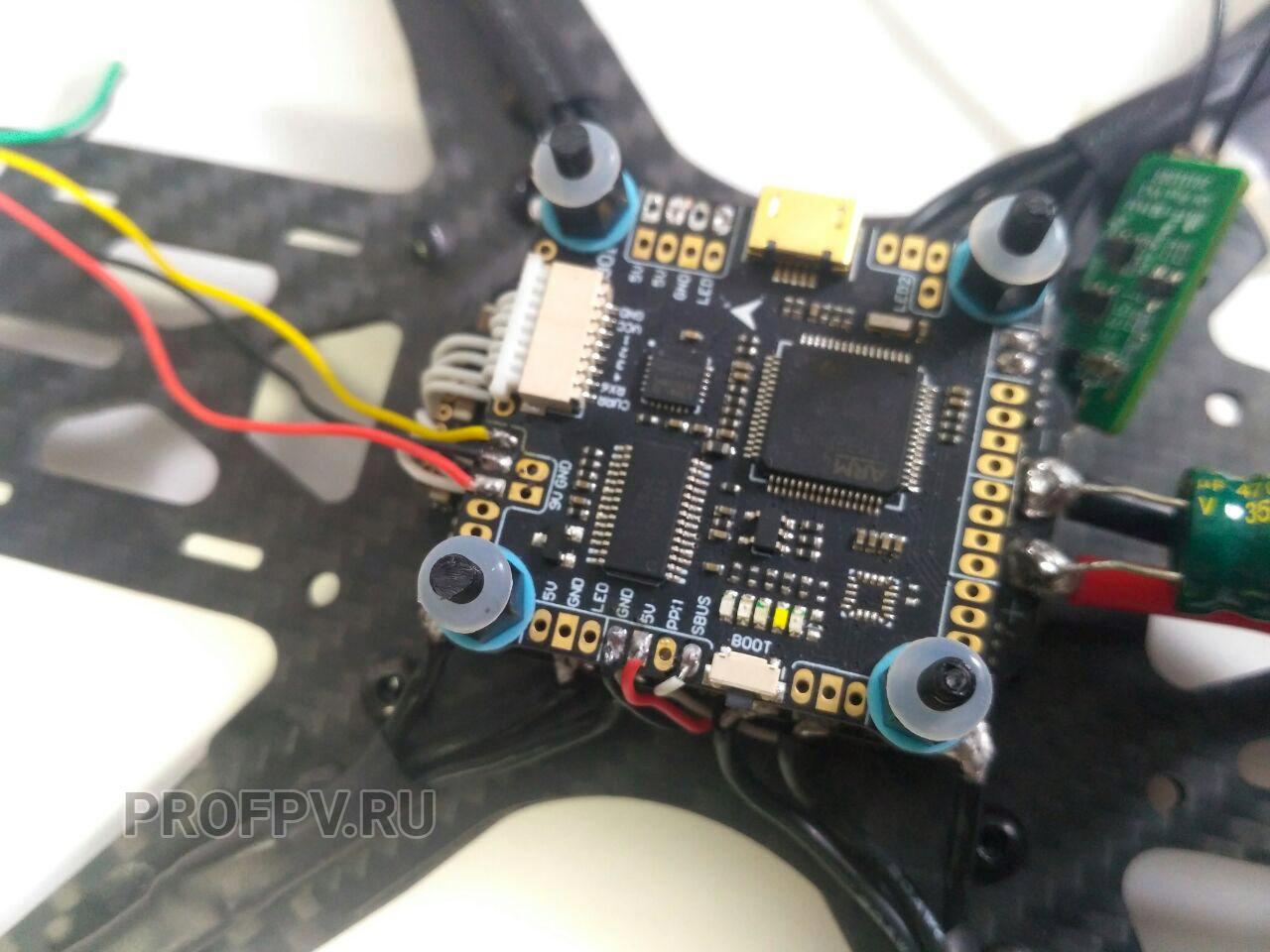
Установка полетного контроллера
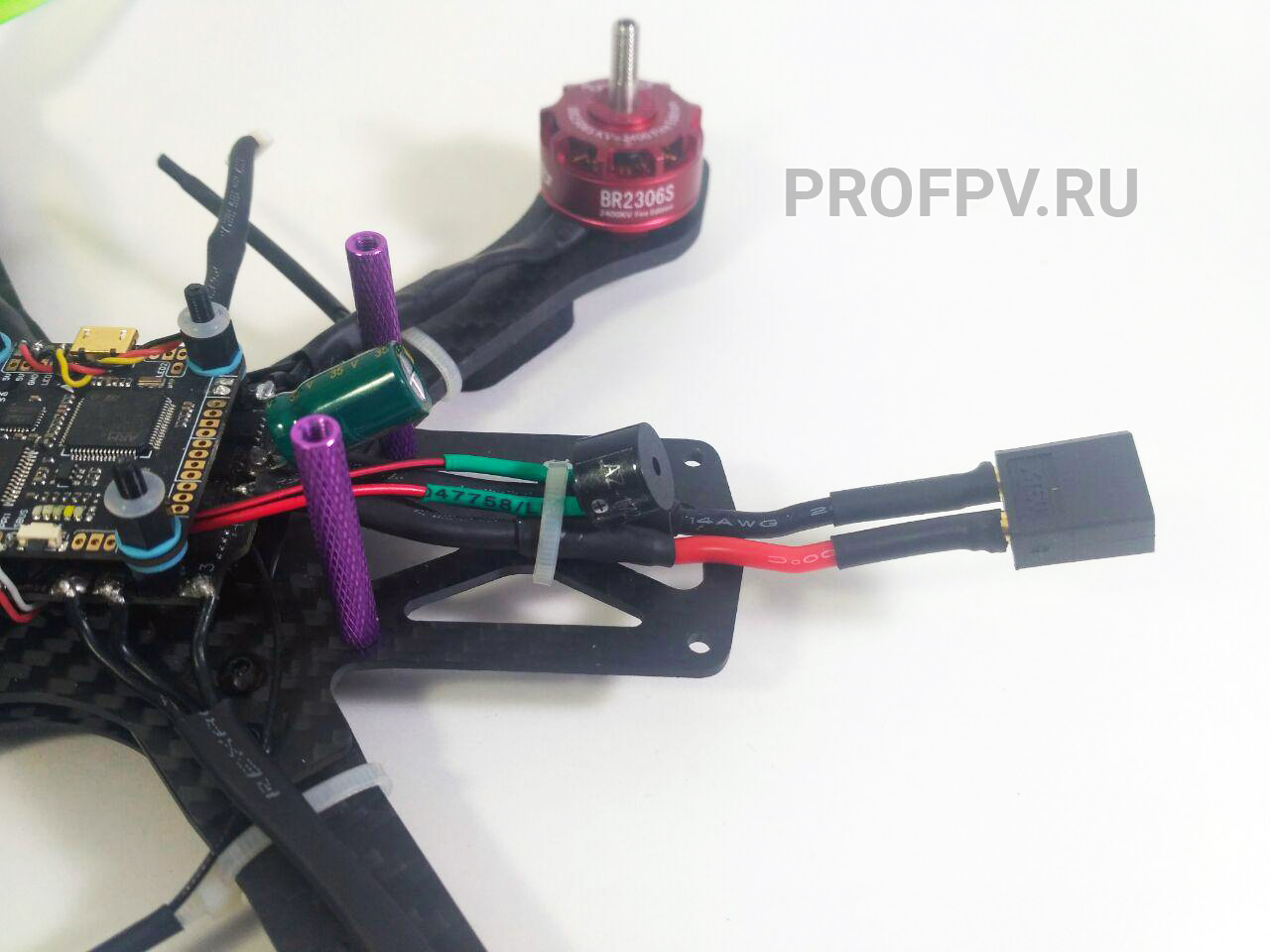
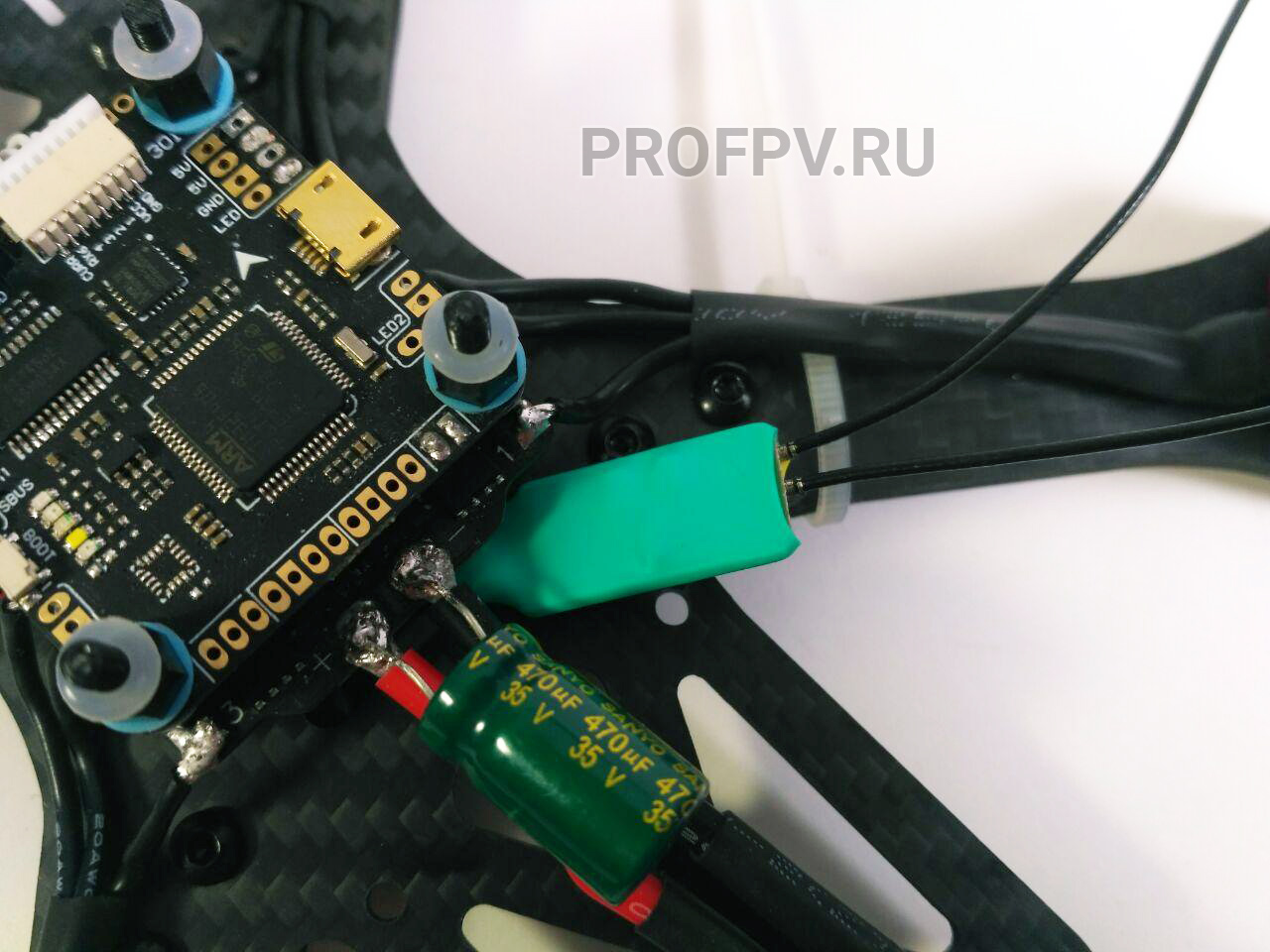
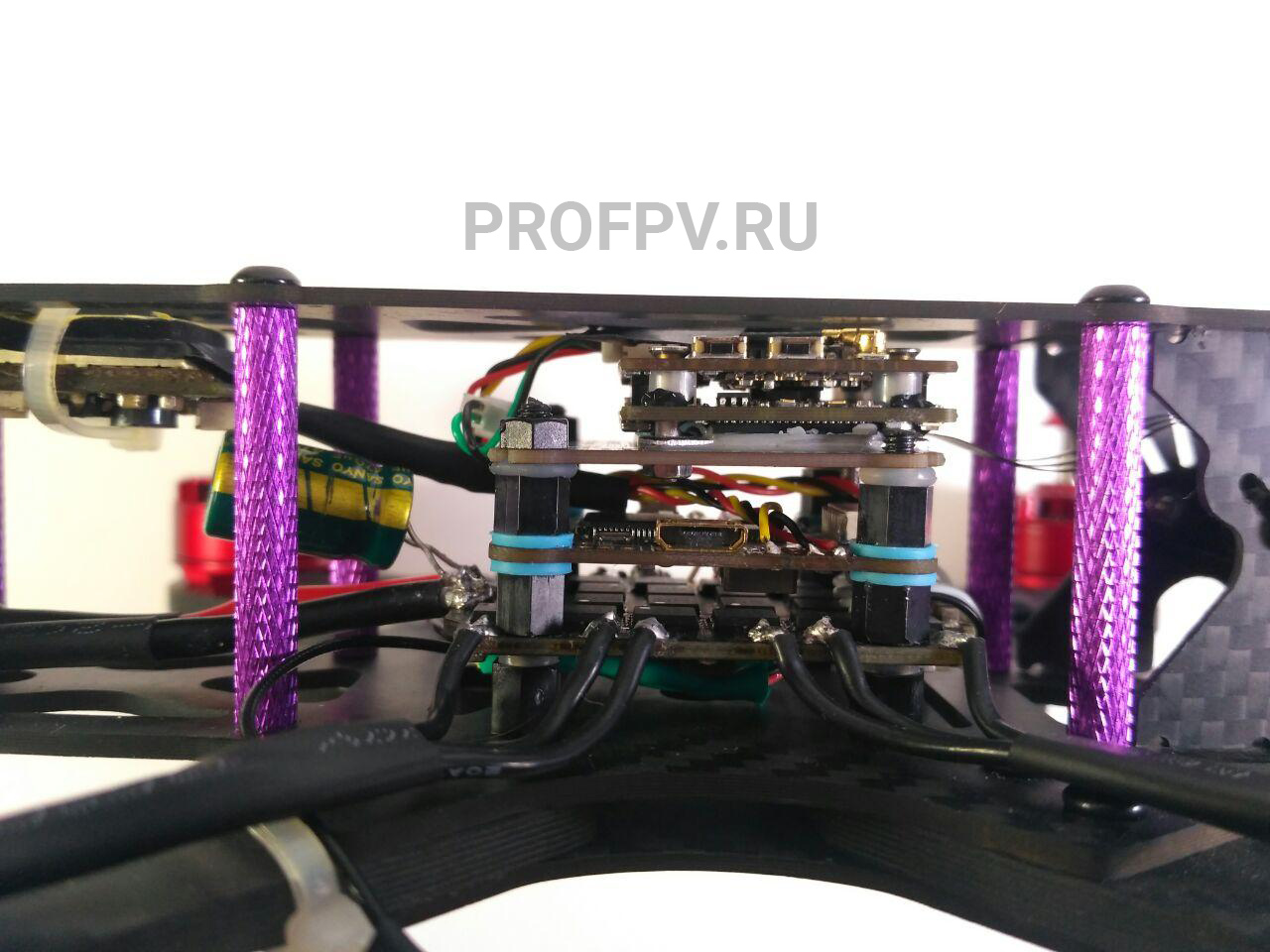
Пошаговая сборка квадрокоптера включает в себя установку полетного контроллера. Вам нужно припаять провода и конденсатор для подключения аккумулятора. Забыл сфотографировать этот момент, поэтому фото уже после нескольких шагов. Соблюдайте полярность. В комплекте с Mamba F405 шли короткие провода, поэтому пришлось наращивать дополнительные, чтобы хватало удобно подключать аккумулятор. Изначально припаял короткие, подумав, что будет удобно подключать, но после сборки понял, что не совсем и быстренько переделал их. Делайте так, чтобы провод выходил за раму на несколько сантиматеров. Места контактов тоже оборачиваем в термоусадку. На конденсаторе есть «+» и «-«, это все хорошо припаиваем к плате с регуляторами оборотов. Контакт должен быть хороший, поэтому, дайте припою прогреться:

Далее устанавливаем на пластиковые стойки полетный контроллер. В комплекте идут синие демпферные амортизаторы. Они нужны, чтобы гасить вибрации и колебания, чтобы не мешать работе гироскопу. Наверх насаживаем пластиковые гайки и затягиваем, но не сильно туго. Подключаем белый коннектор от регуляторов оборотов к полетному контроллеру. Как видите, к этому этапу были убраны почти все фиолетовые стойки, потому что мешали. Не повторяйте эту ошибку и не ставьте их раньше времени:



Монтаж проводов для камеры
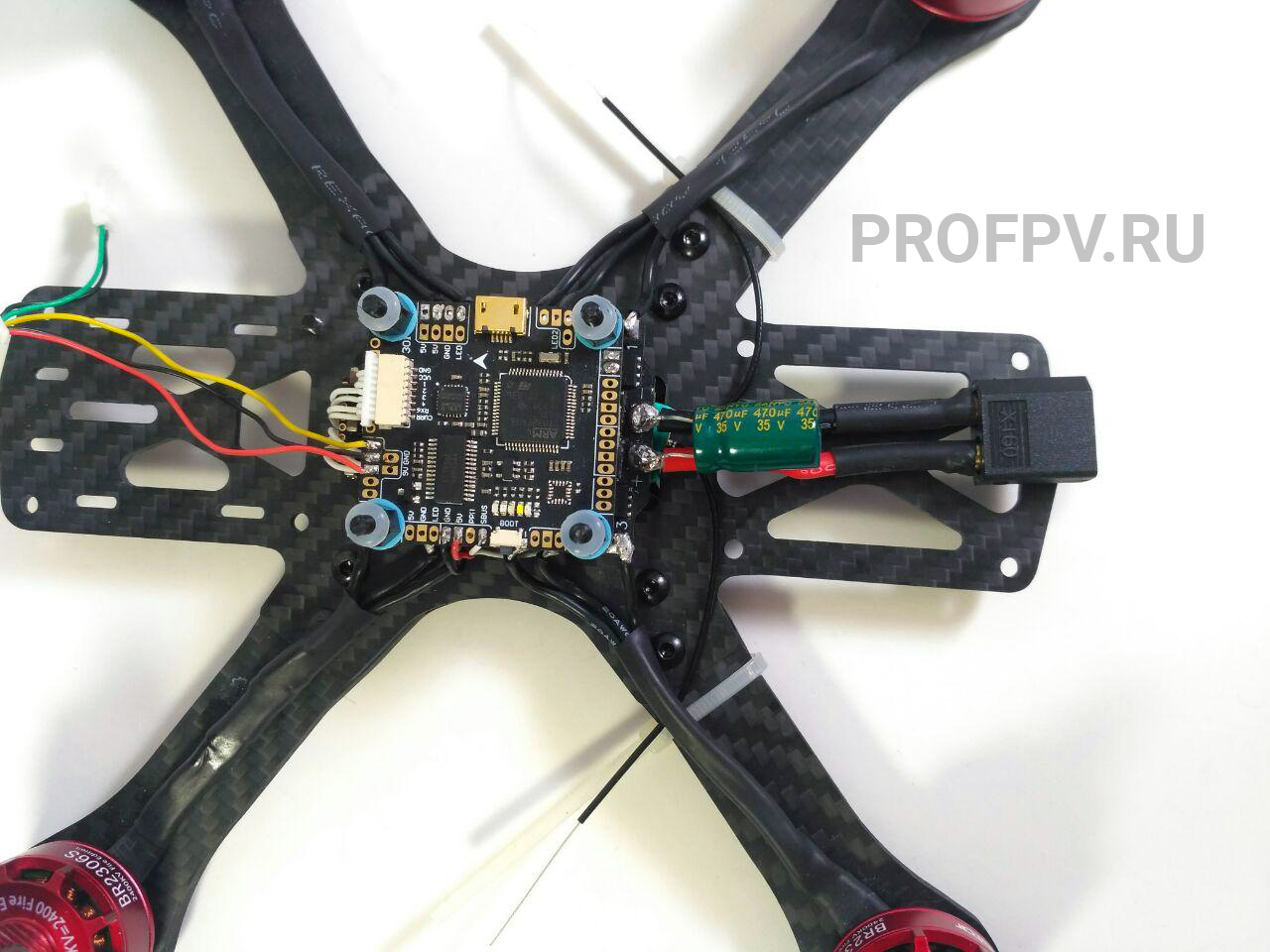
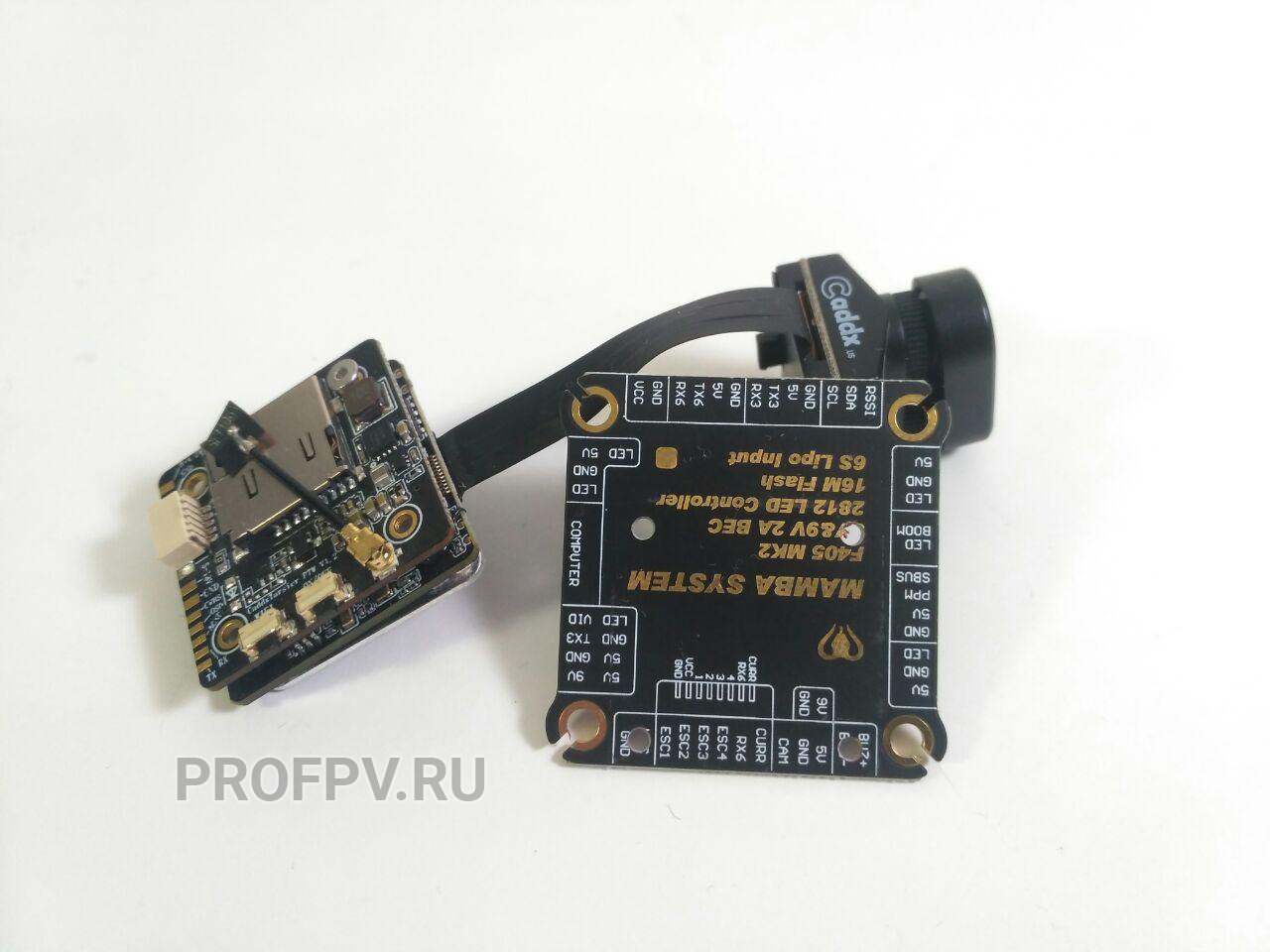
Далее припаиваем провода от камеры. Согласно схемы, мы можем припаять контакты к этим площадкам:

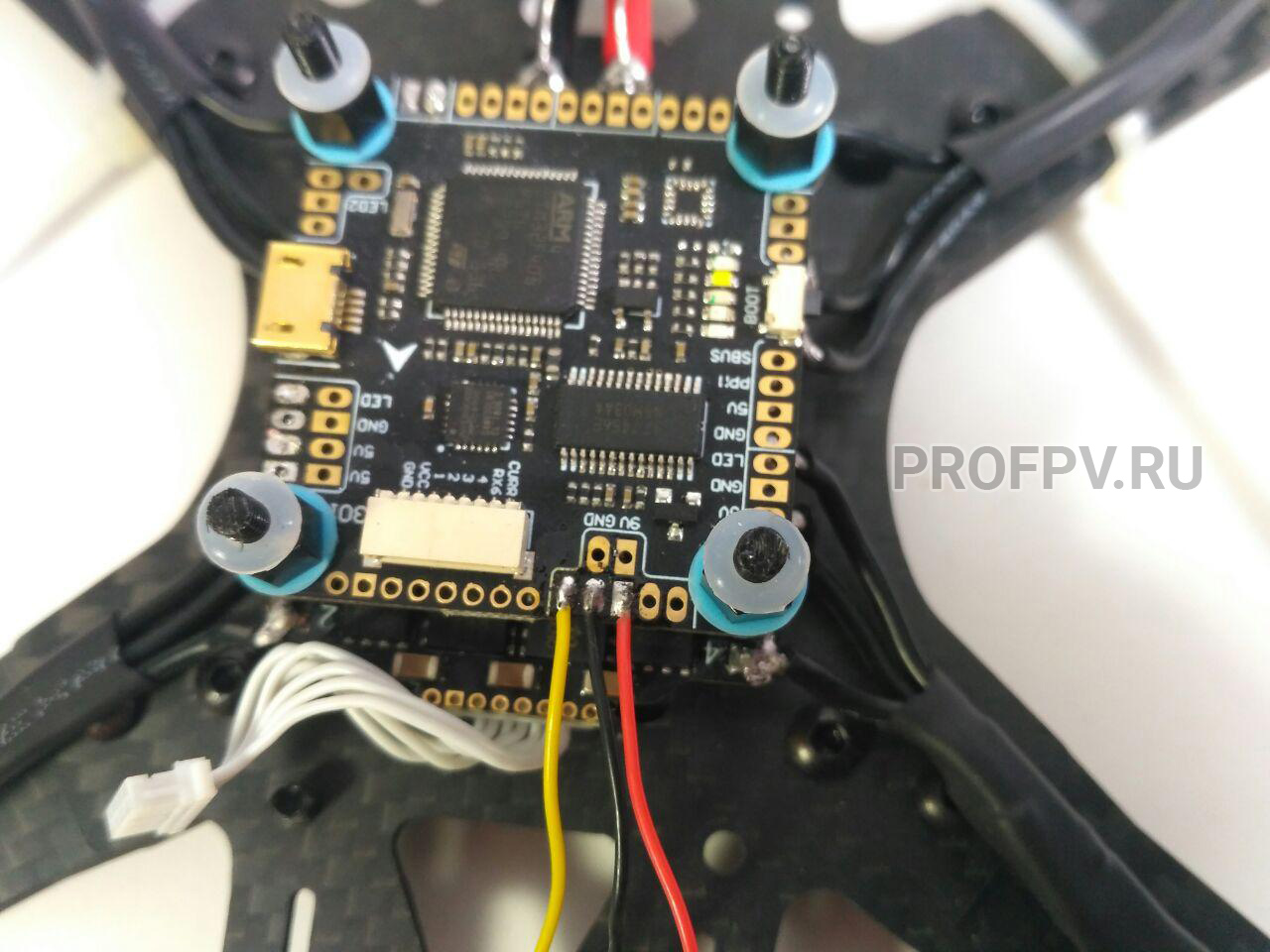
На фото выше:
- желтый провод — видео;
- черный — земля;
- красный — 5 V.
Отходящий проводок (зеленый + черный) это контакт для подключения джойстика управления камерой. Но Caddx Tarsier 4K настраивает с телефона через приложение, поэтому, если хотите, можете отрезать лишние провода.
Монтаж приемника
Приемник используется FrSky XM+.
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
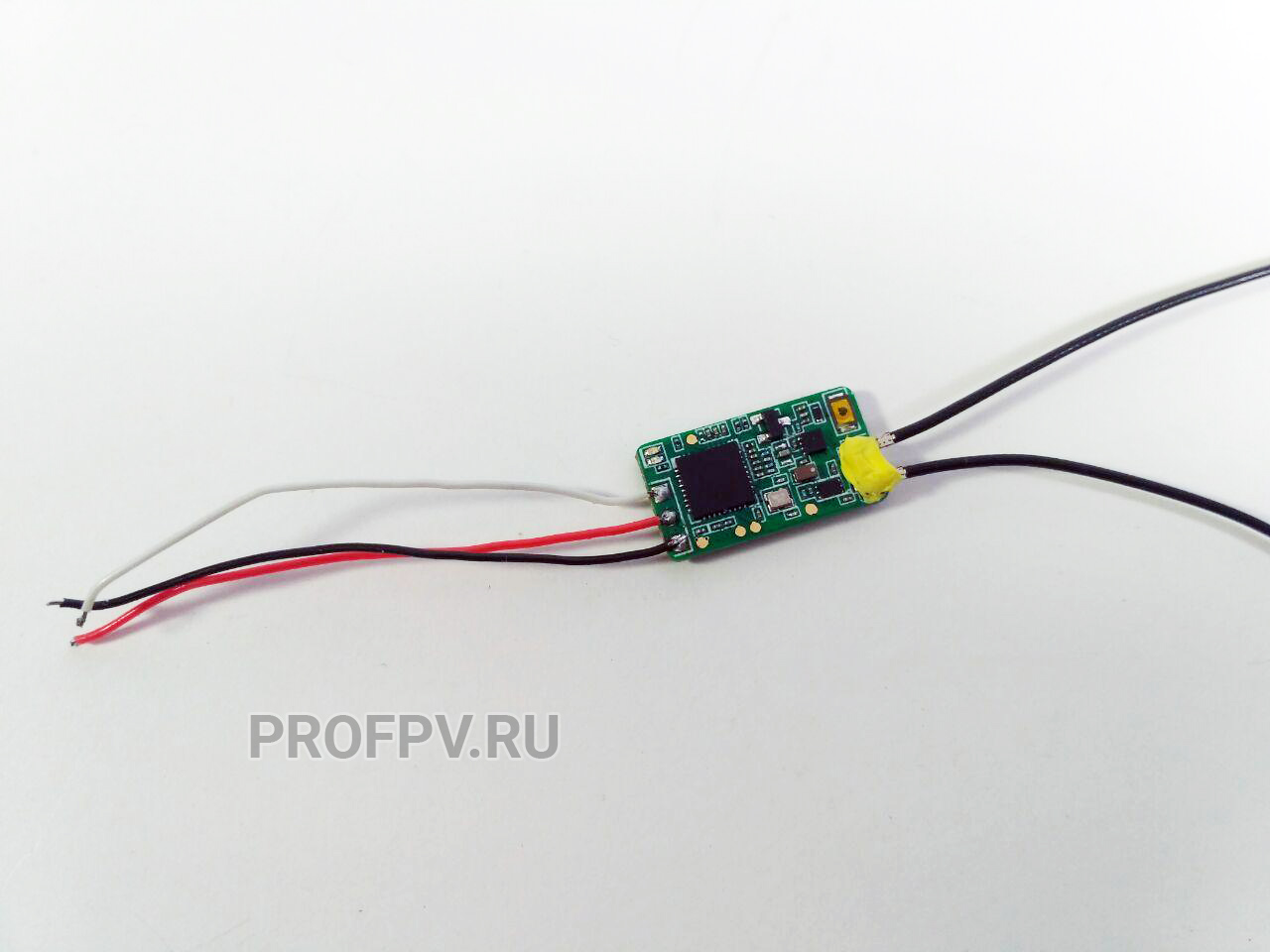
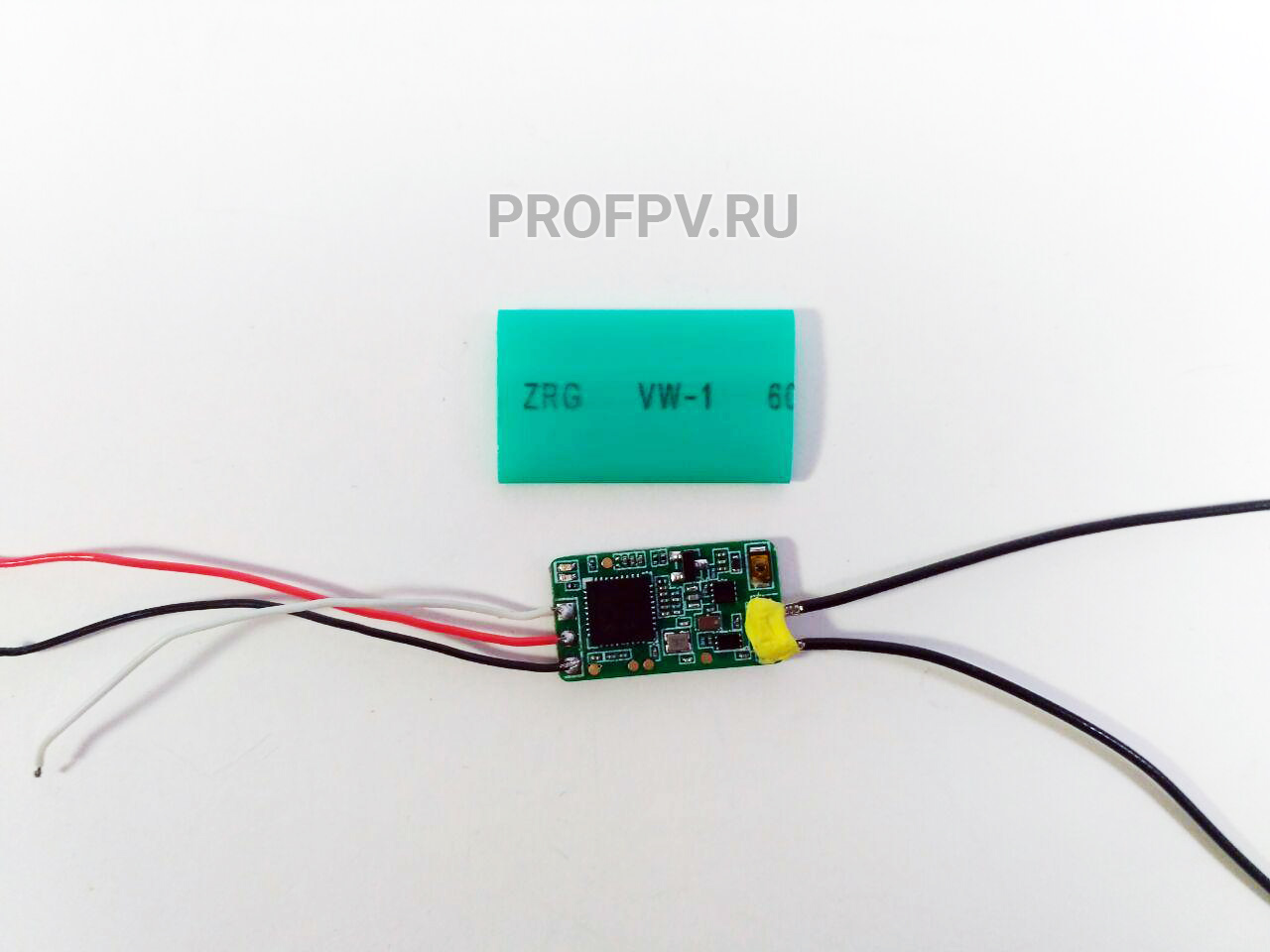
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: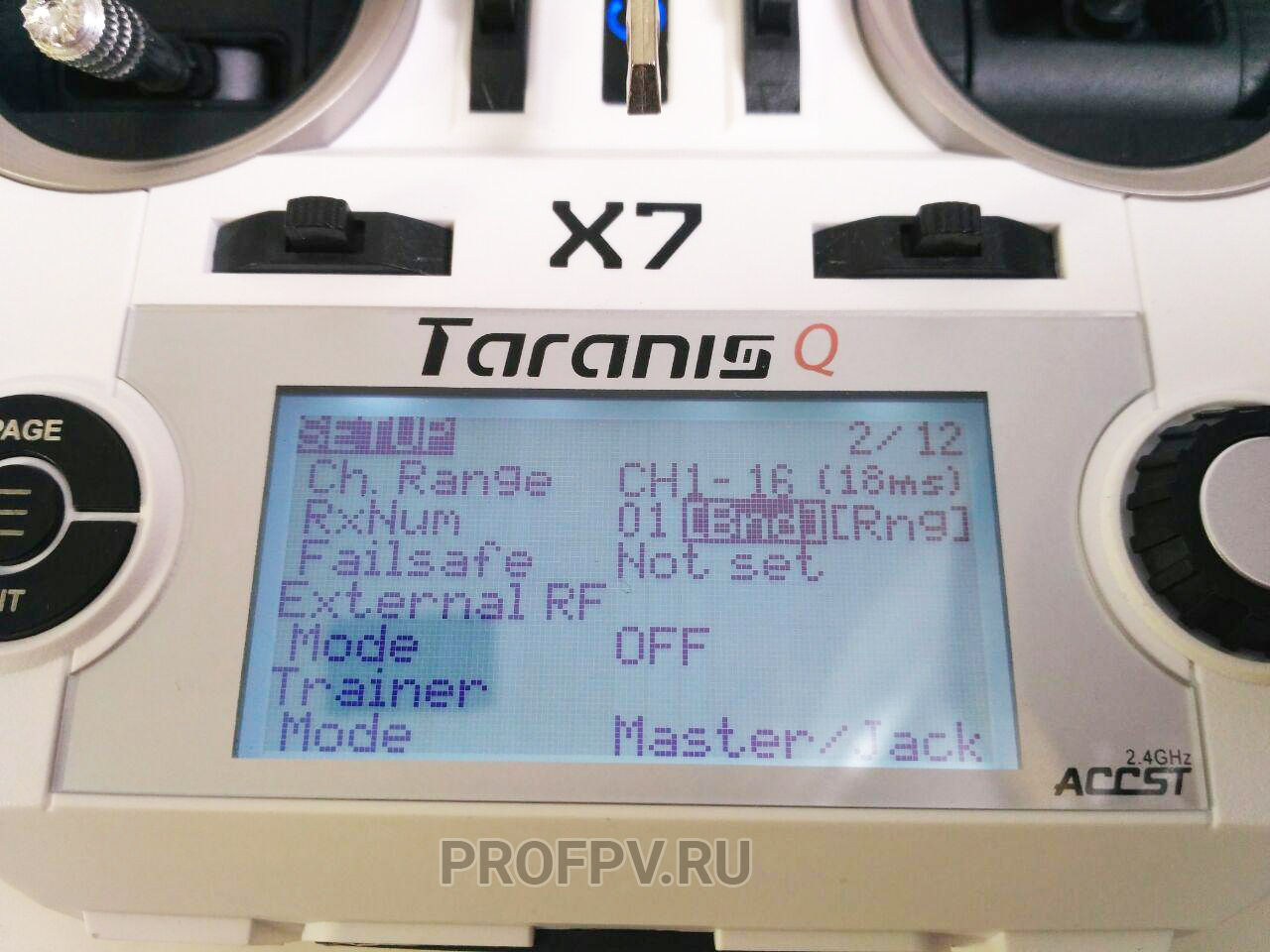
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
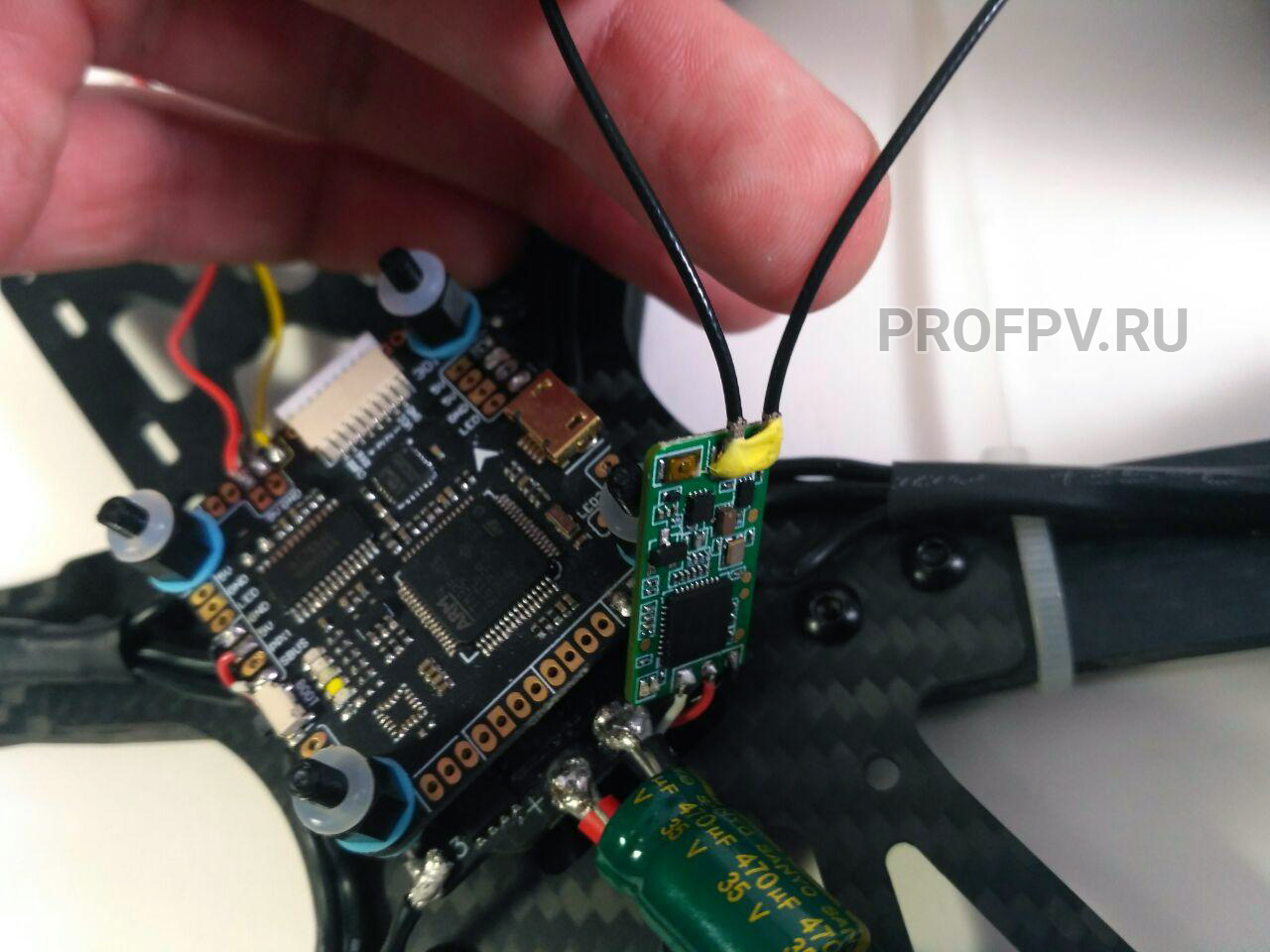
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:

Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:


Получится вот такое:

Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Установка видеопередатчика и пищалки
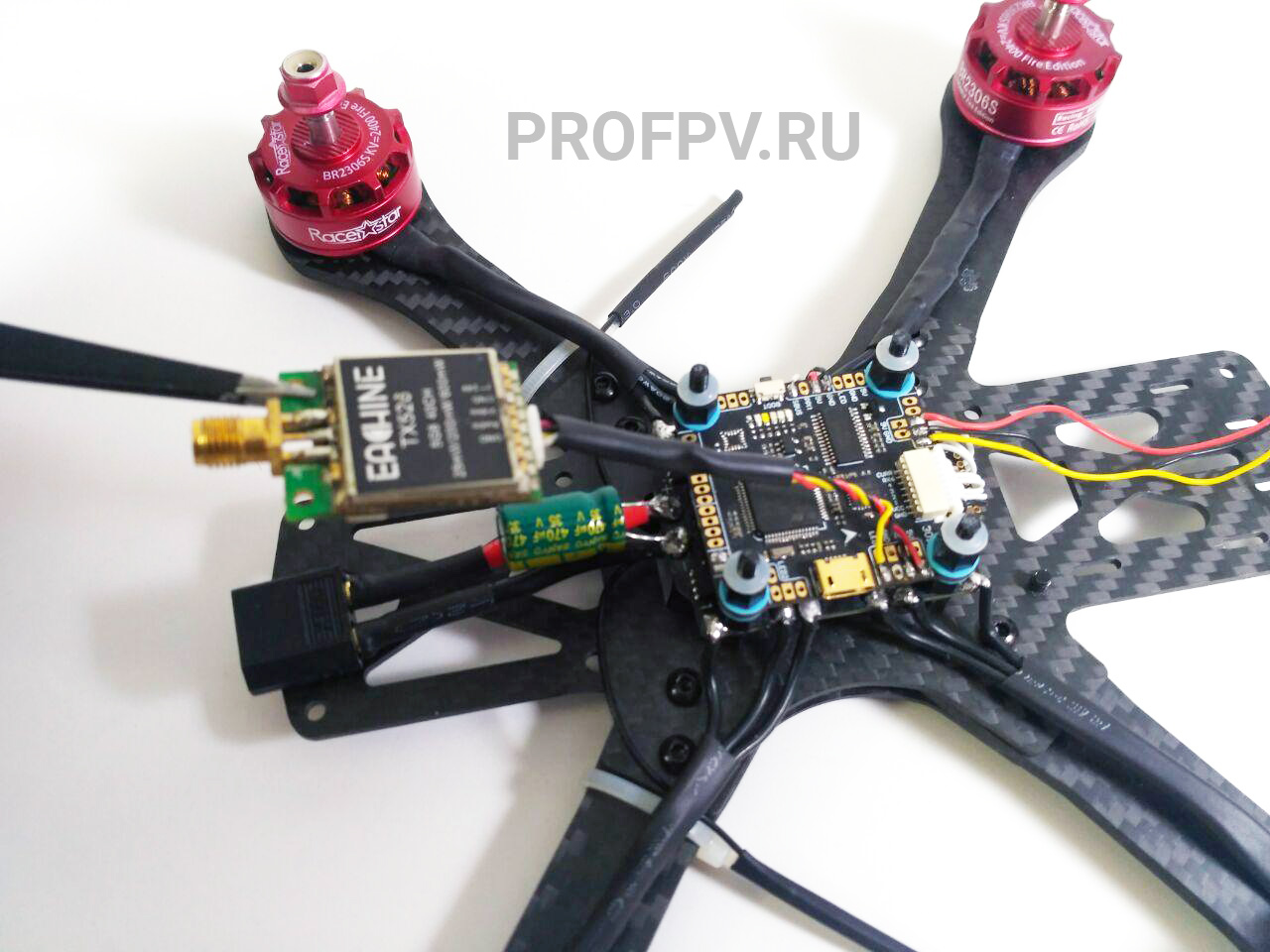
Сборка FPV квадрокоптера не обойдется без видео. Видеопередатчик используется классический: Echine TX528 и мы подключаем его к полетному контроллеру. Если провода у видеопередатчика длинные, то укорачиваем их до той длины, чтобы можно было прикрепить видеопередатчик к краю верхней планки рамы и провода не висели. Чтобы минимизировать помехи в видео, провода скручиваем в жгут. По схеме, мы можем припаиваться к этим контактам:

Пищалку припаиваем рядом с контактами на камеру. Пищалка нужна для звукового сопровождения различных уведомлений, а также для поиска упавшего квадрокоптера. В общем, это необходимая вещь. Пищалки нужны с встроенным генератором. Провода (черный и красный) припаиваем сюда:
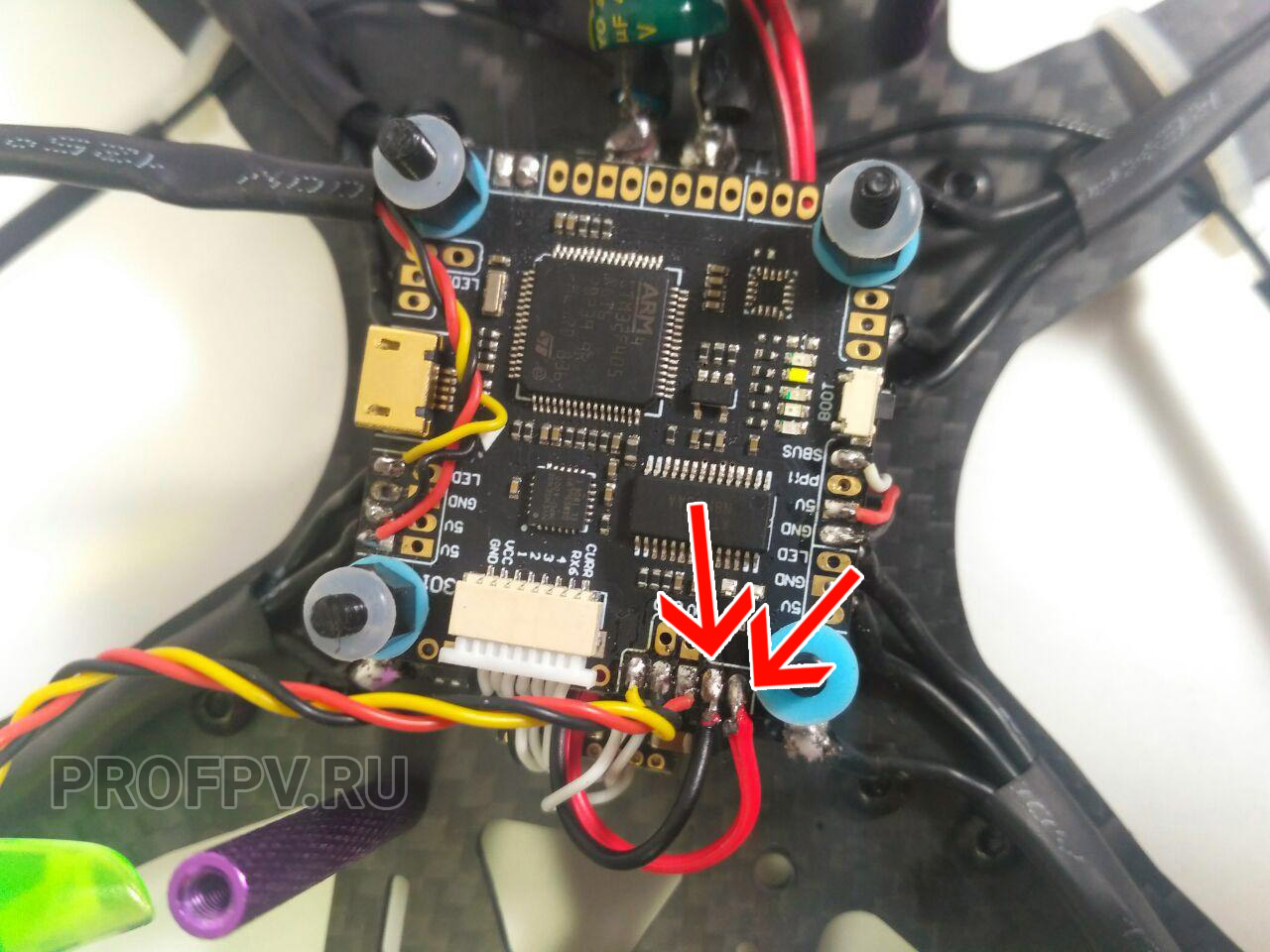
Провода пищалки также просовываем под полетным контроллером. На выходе с задней стороны, привязываем пищалку и кабель питания пластиковой стяжкой к раме.
Видеопередатчик крепим пластиковыми стяжками к верхней панели, попутно прикрутив антенну:
Монтаж Caddx Tarsier 4K в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:




Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:

Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):



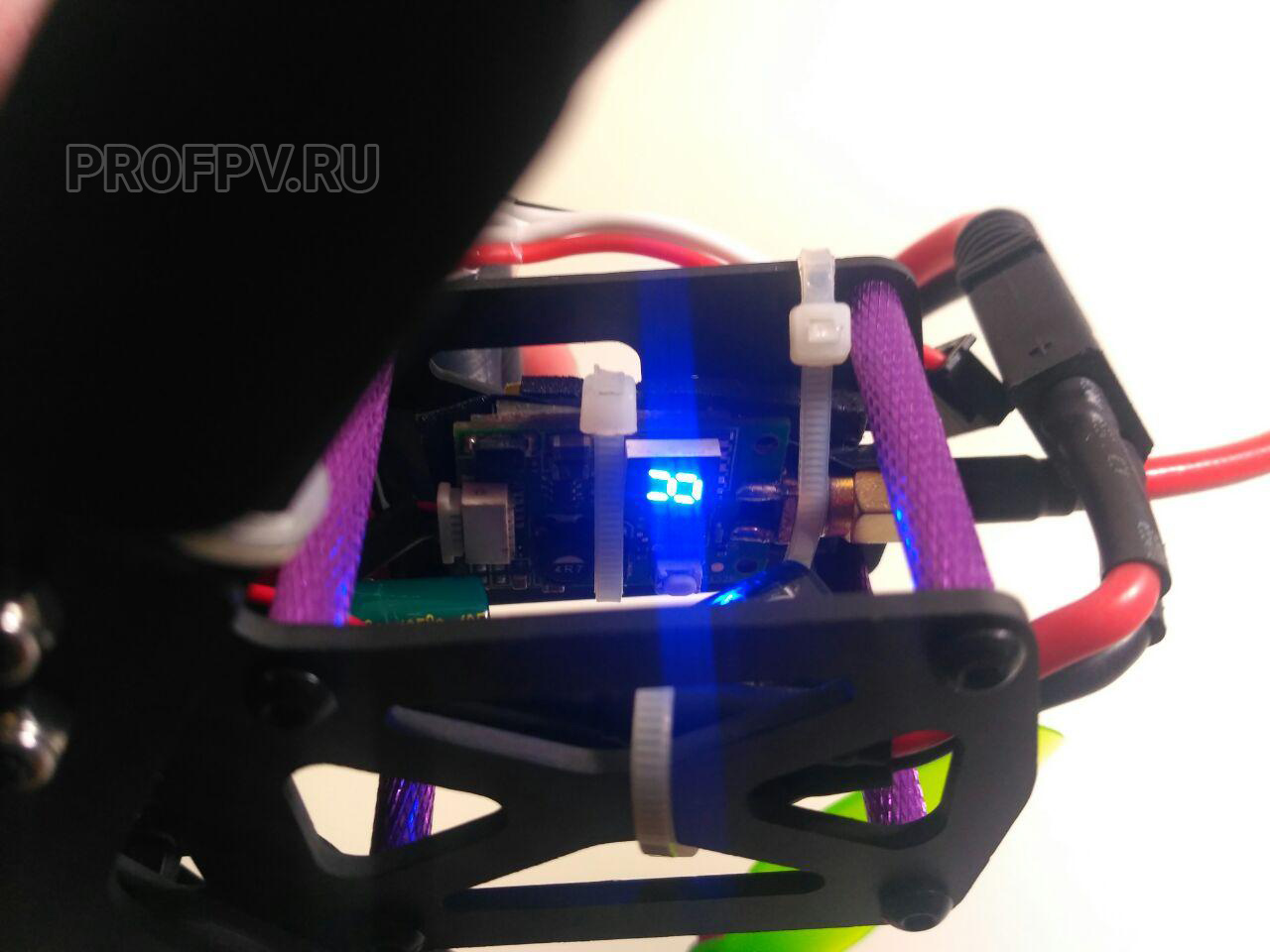
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.



Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:

Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
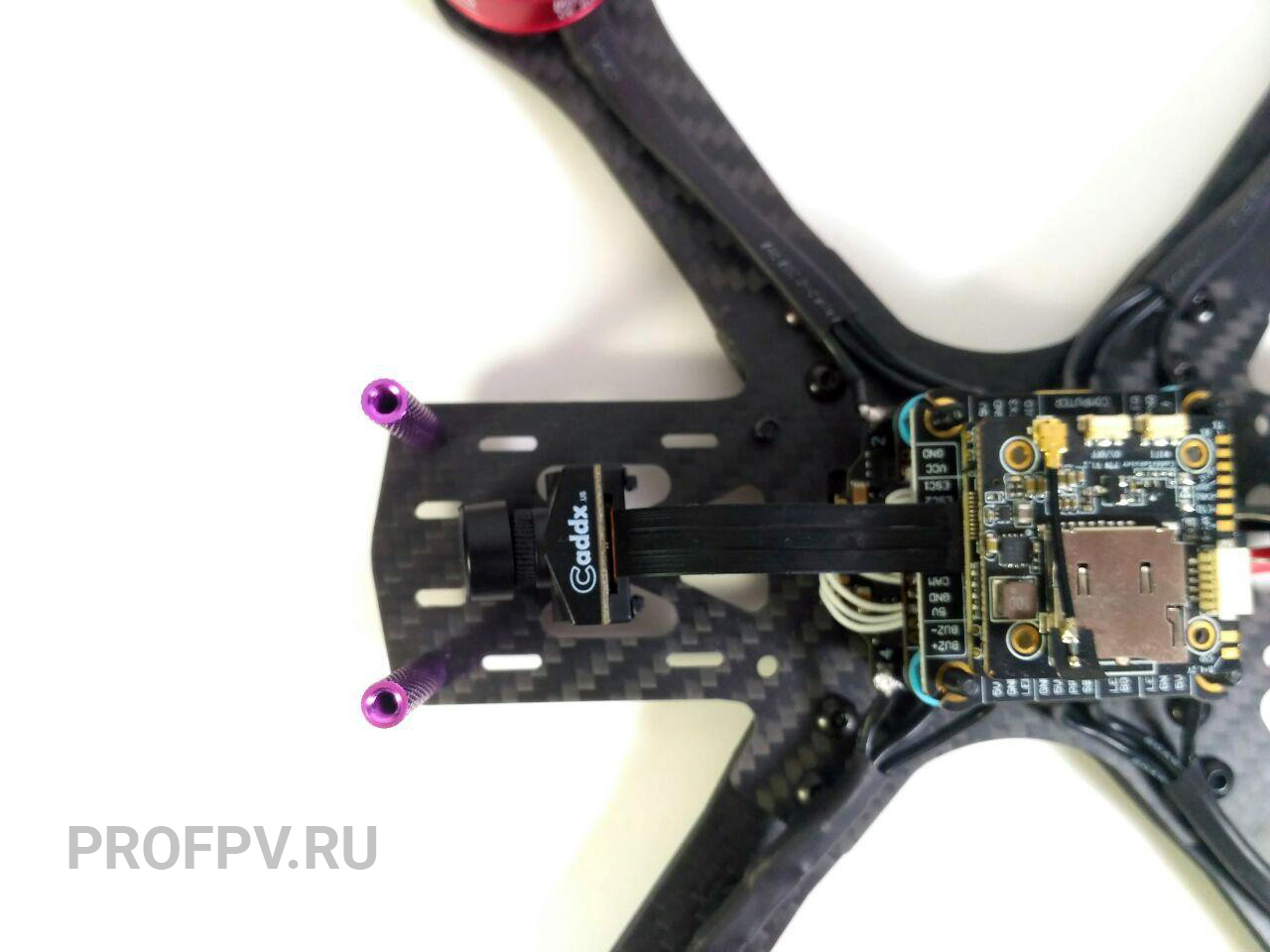
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:


Крепим верхнюю панель к раме:




Последние штрихи
Аккумулятор в этой сборке квадрокоптера будет крепиться сверху. Так как там шляпки винтов, то нам необходимо сгладить эту поверхность. Для этих целей был выбран кусок резины (камера от велосипеда) и 2 полоски двустороннего скотча:

В сборке FPV квадрокоптера можно применить любой материал, помните, этот квадрокоптер собираете вы сами и так, как вы хотите, поэтому используйте фантазию, не обязательно следовать тому, как показано здесь.
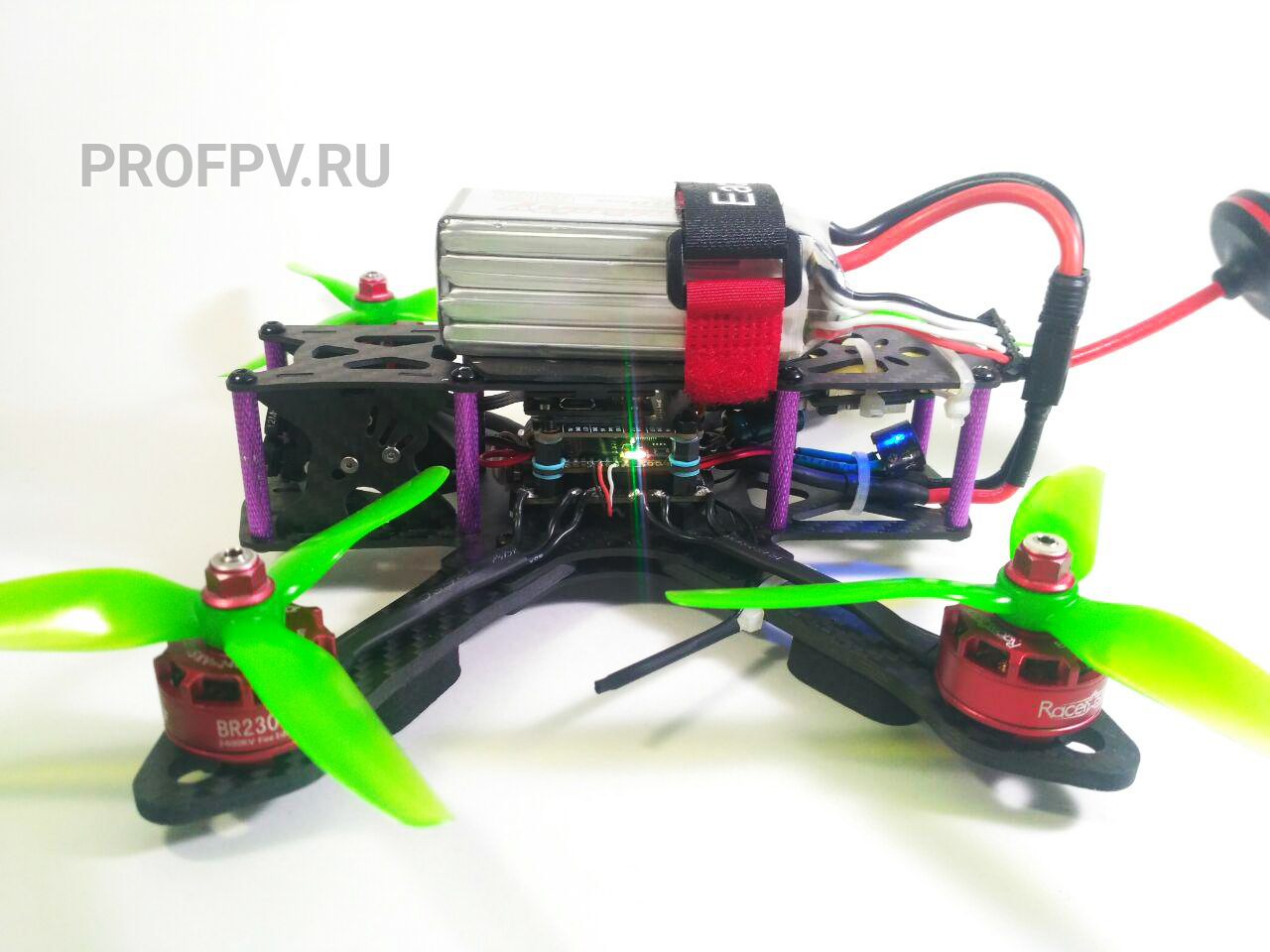
Итоговый вид квадрокоптера:
На этом с технической частью закончено и пора переходить к программной: прошивка и настройка!
Прошивка и настройка квадрокоптера после сборки своими руками
После сборки квадрокоптера, переходим к настройке и прошивке квадрокоптера. Вам понадобится:
- Betaflight Configurator;
- BLHeliSuite;
- Кабель USB — microUSB.
Скачать Betaflight Configurator и BLHeliSuite можно на этой странице: Как и где скачать Betaflight Configurator и BLHeli
Если при подключении квадрокоптера к компьютеру он не видит полетный контроллер, то вам нужно сделать следующее:
- Качаем по ссылке https://www.st.com/en/development-tools/stsw-stm32102.html STM32 Virtual COM Port Driver — там нужно согласиться на использование драйвера и ввести свою почту, на которую придет ссылка для скачивания. Без этого драйвера вы не подключитесь ни к одному конфигуратору. Устанавливаем драйвер. Откройте файл Readme в архиве — там написано в разделе «How to use», чтобывы зашли в директорию установки и запустили файл dpinst_x86.exe или dpinst_amd64.exe.
- Если это не помогло и вы намудрили с драйверами, попробуйте поставить прошлую версию драйвера. Более подробно в статье:
Taranis не определяется в симуляторе, настройки USB и JOYSTICK
Прошивка регуляторов оборотов в BLHeliSuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
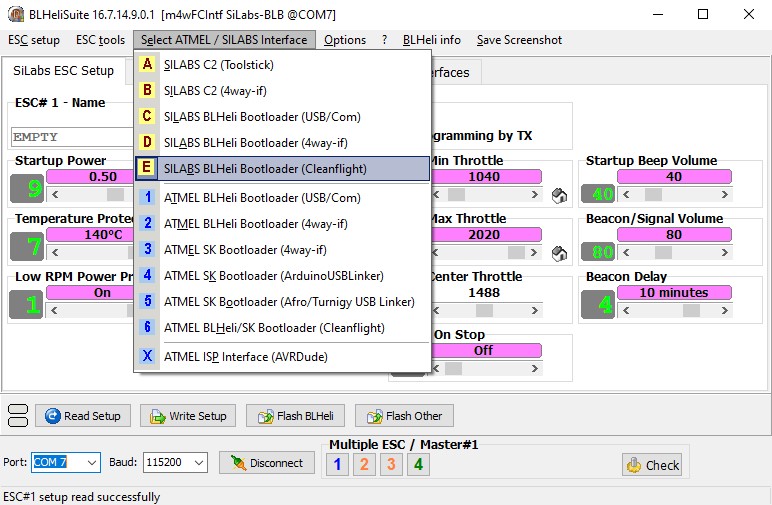
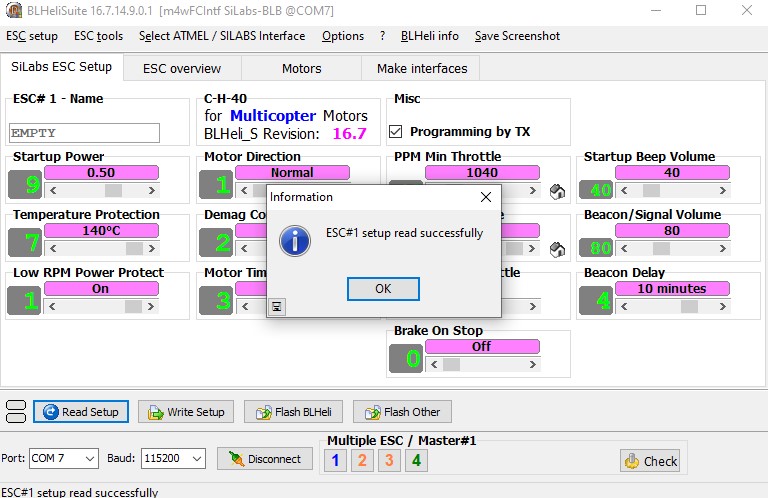
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
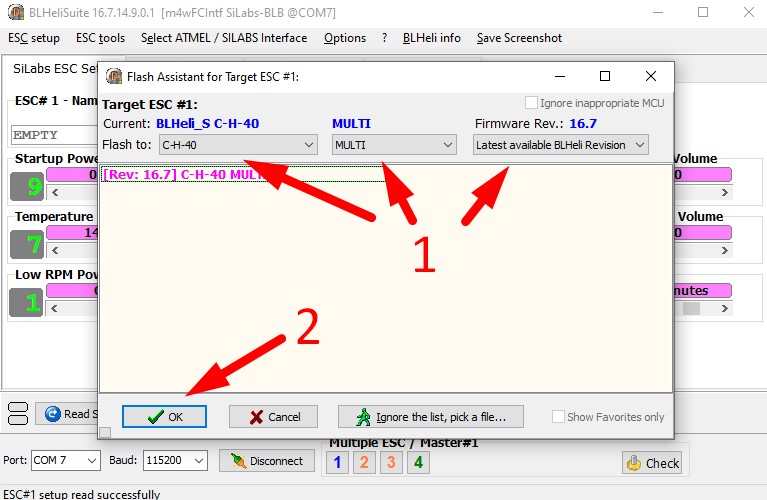
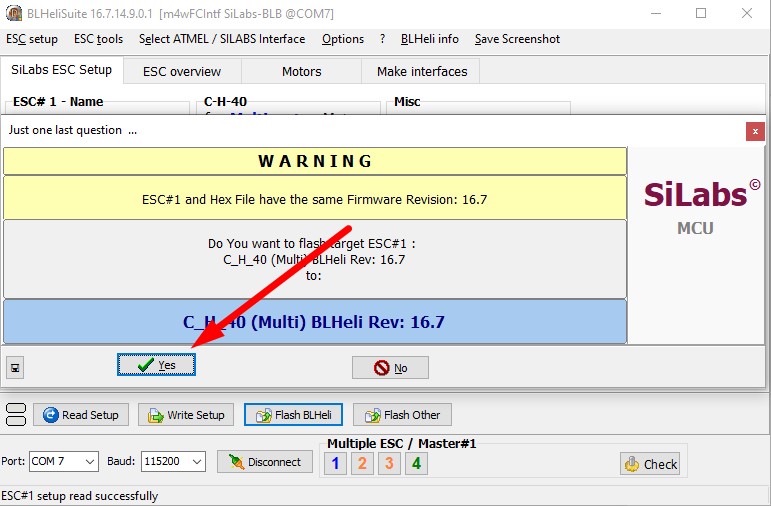
Нажимаем Flash BLHeli:
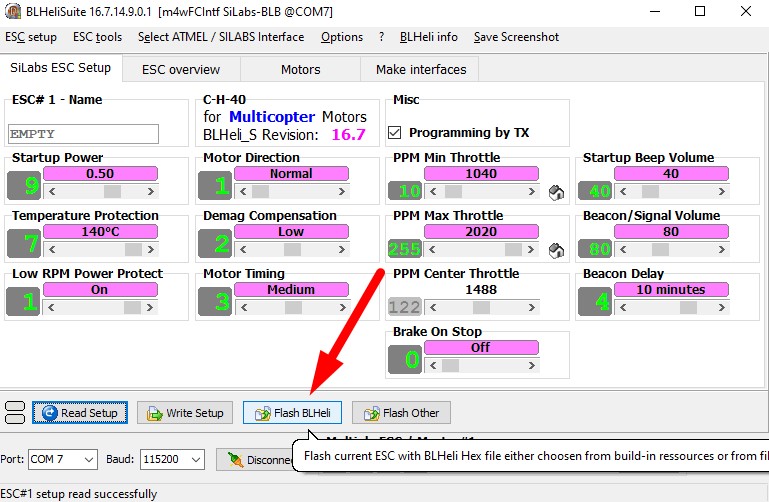
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
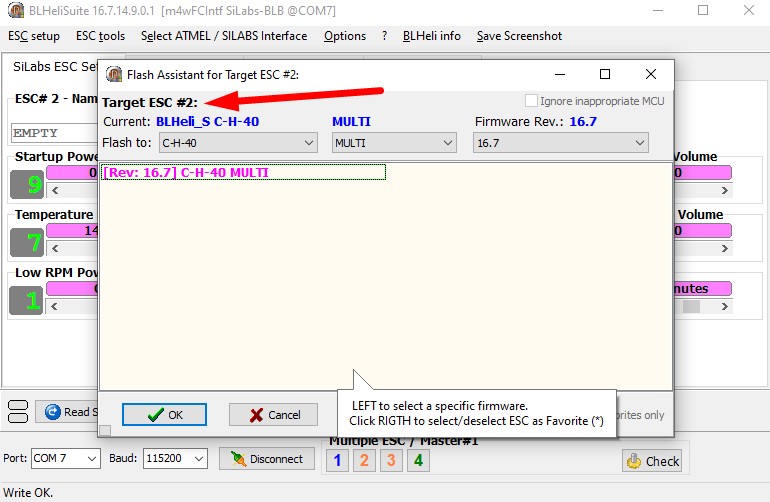
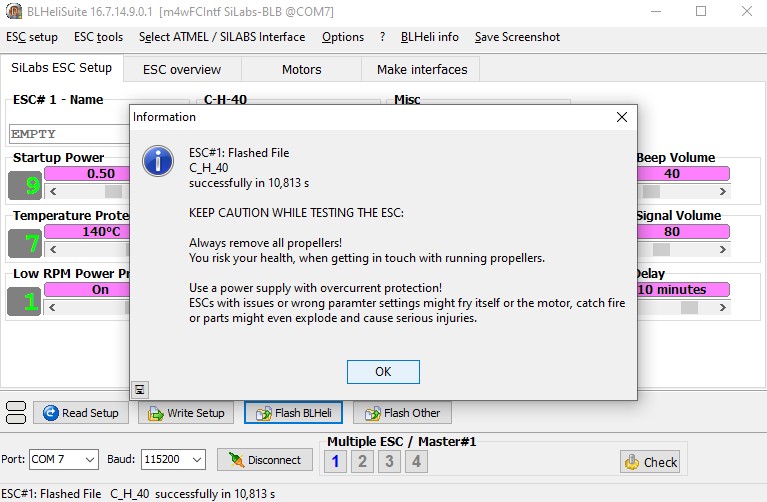
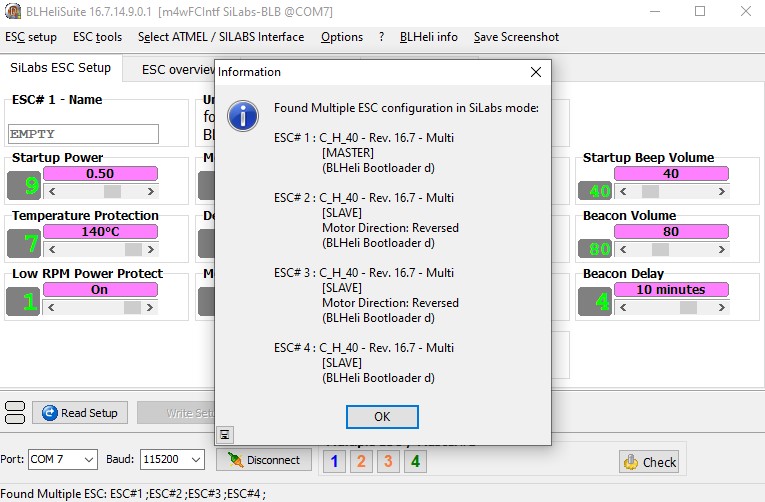
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
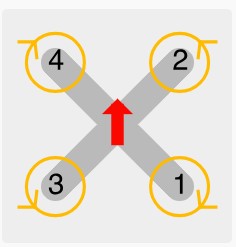
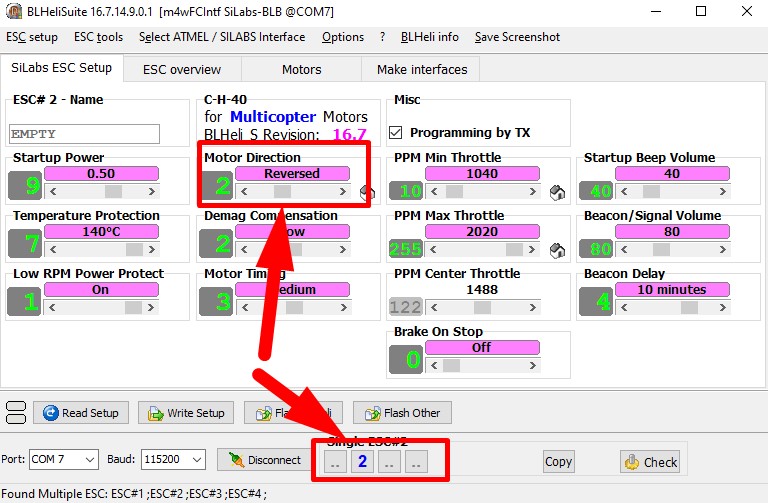
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Прошиваем полетный контроллер в Betaflight Configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
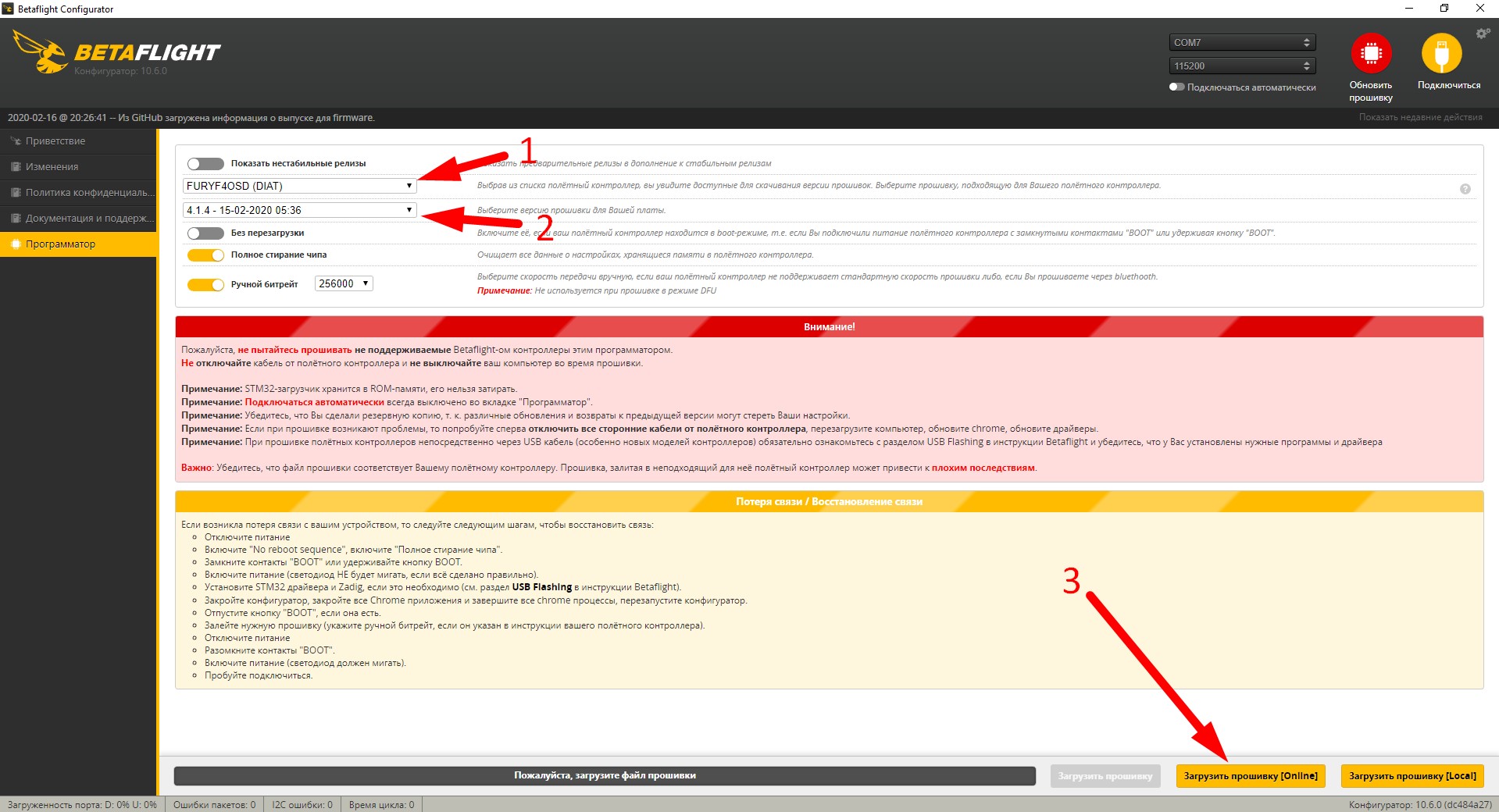
После того, как скачалась прошивка, жмем «Загрузить прошивку«:
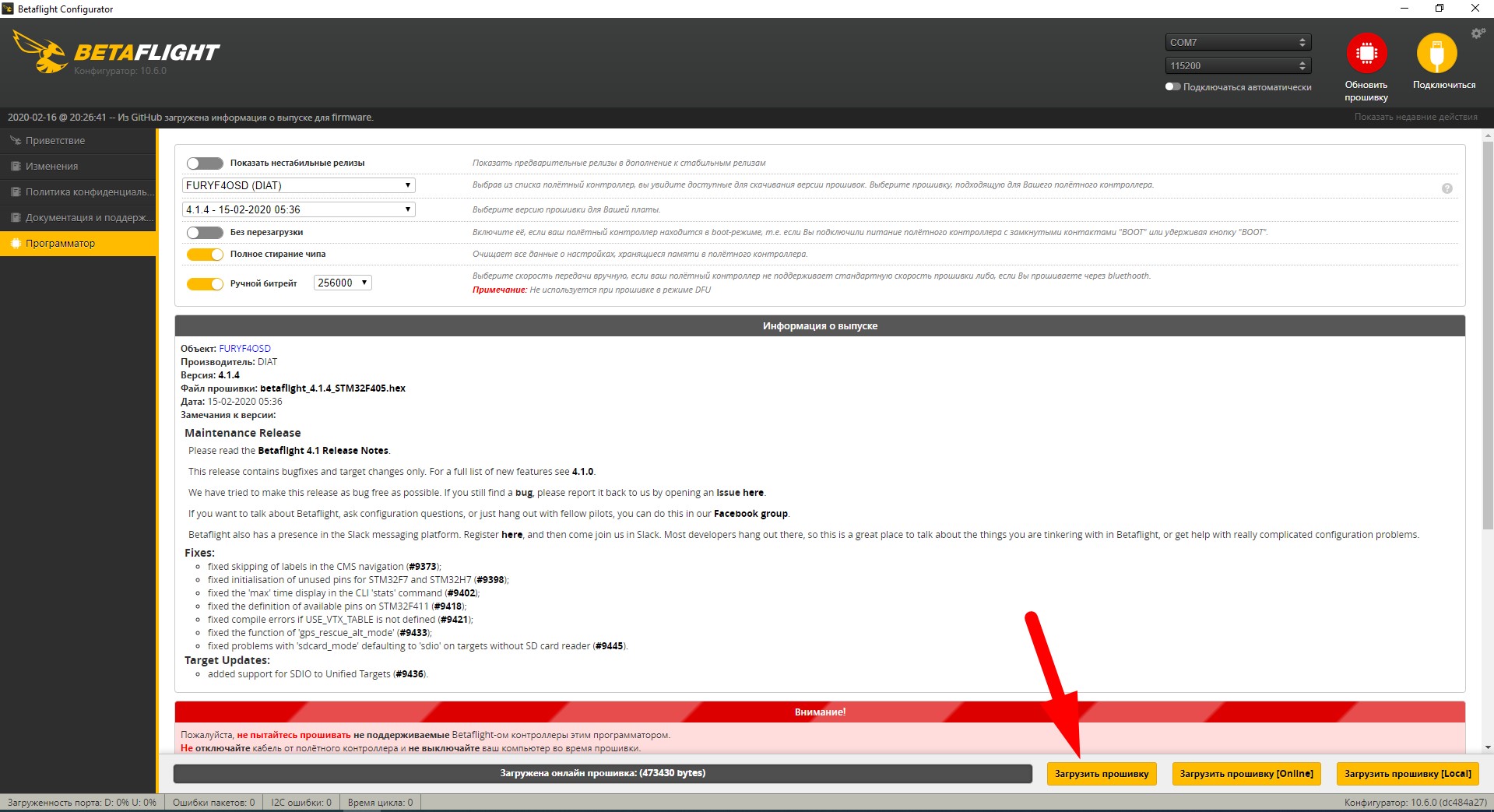
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
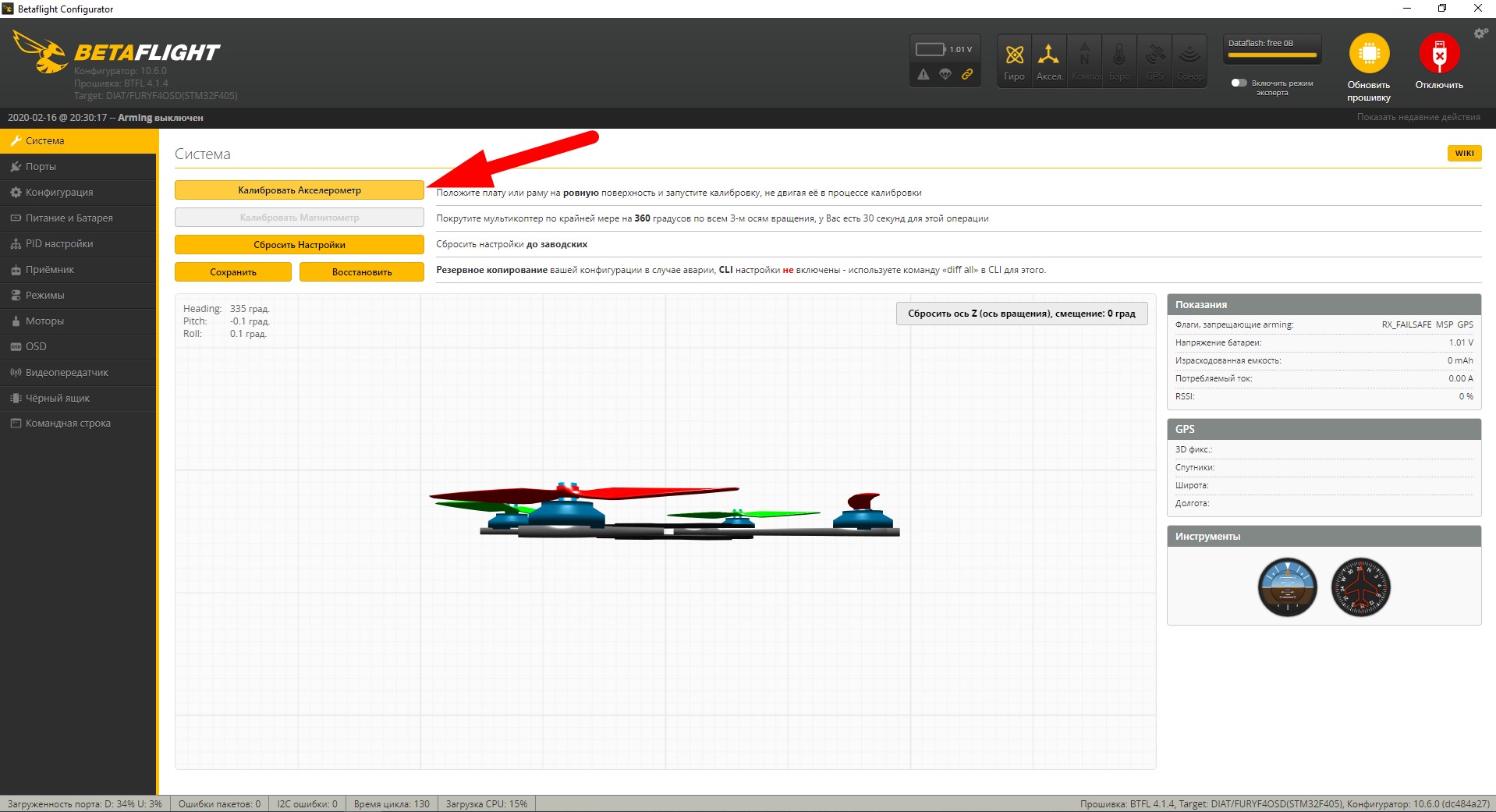
Вкладка Система
На главном экране калибруем акселерометр:
Вкладка Порты
На UART1 ставим Serial RX — это порт для приемника.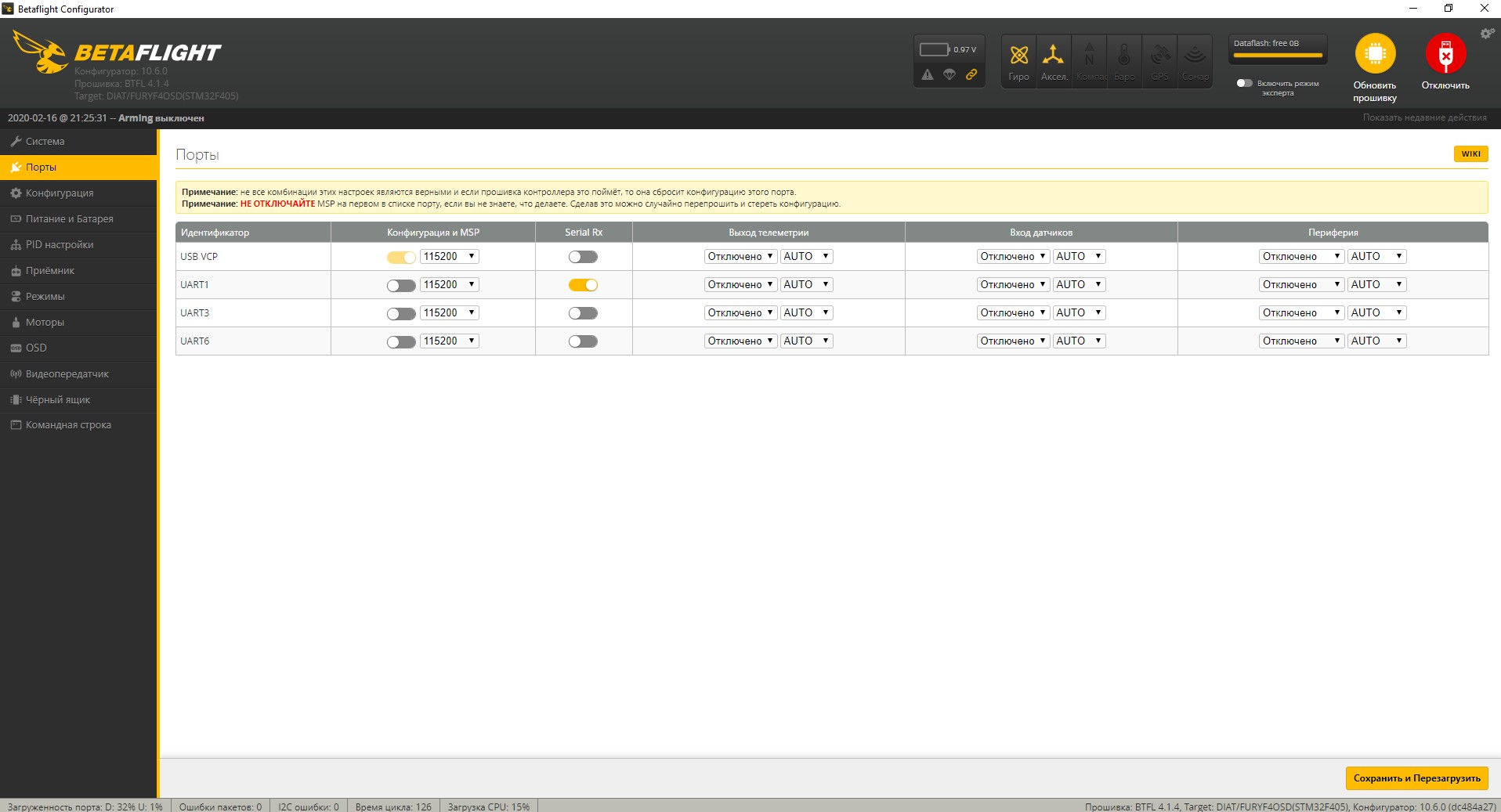
Жмем «Сохранить и перезагрузить«.
Вкладка Конфигурация
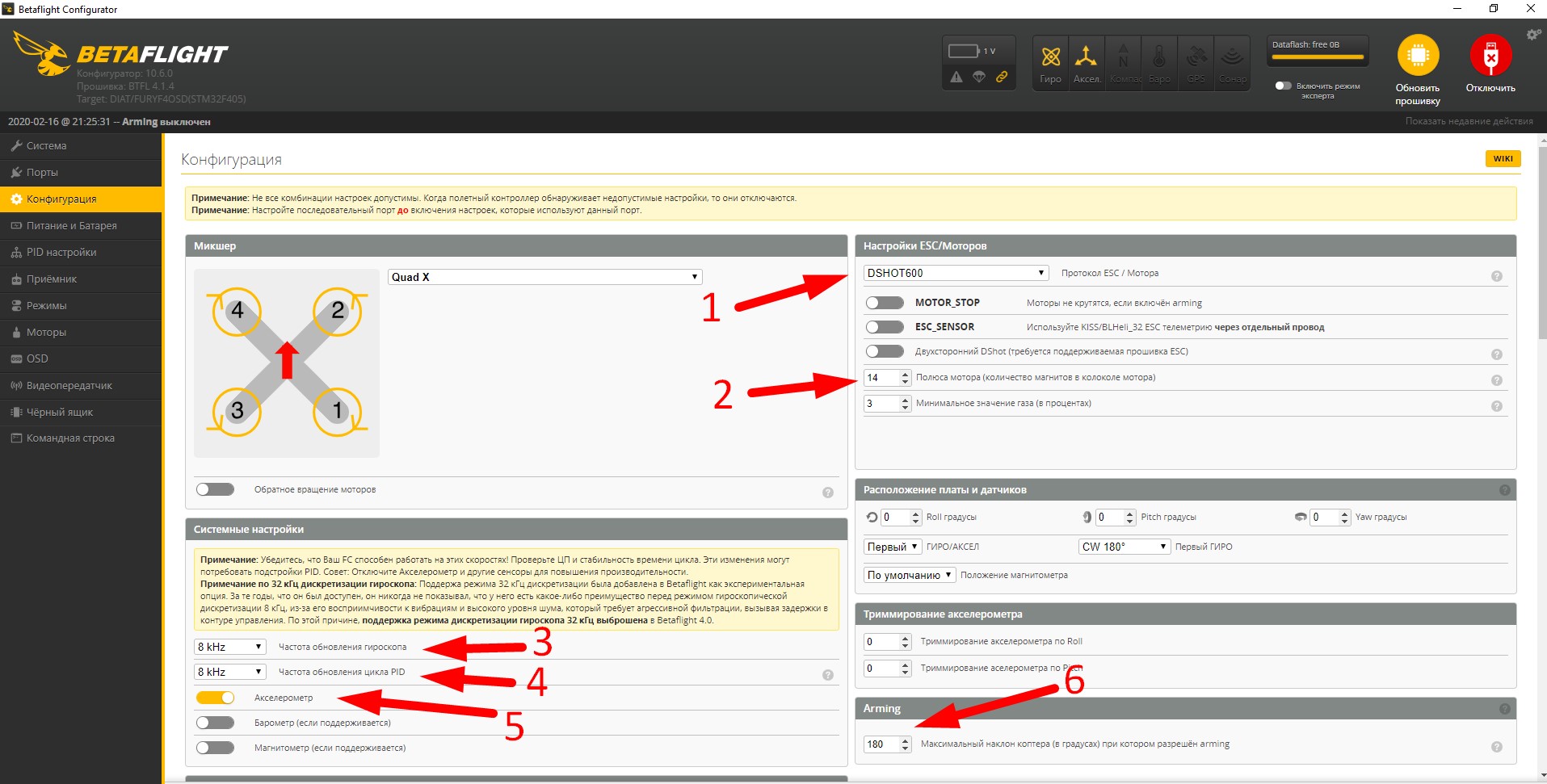
Что на изображениях:
- Протокол для общения Полетный контроллер — регуляторы оборотов: ставим DSHOT600;
- У моторов в сборке 14 магнитов в колоколе. Если вы используете другие двигатели, то считайте;
- Частота обновления гироскопа. Ставим 8kHz;
- Частота обновления ПИДов: ставим 8kHz;
- Включаем акселерометр;
- Максимальный наклон квадрокоптера. Ставим 180, тогда вы сможете заармить дрон почти в любом положении.
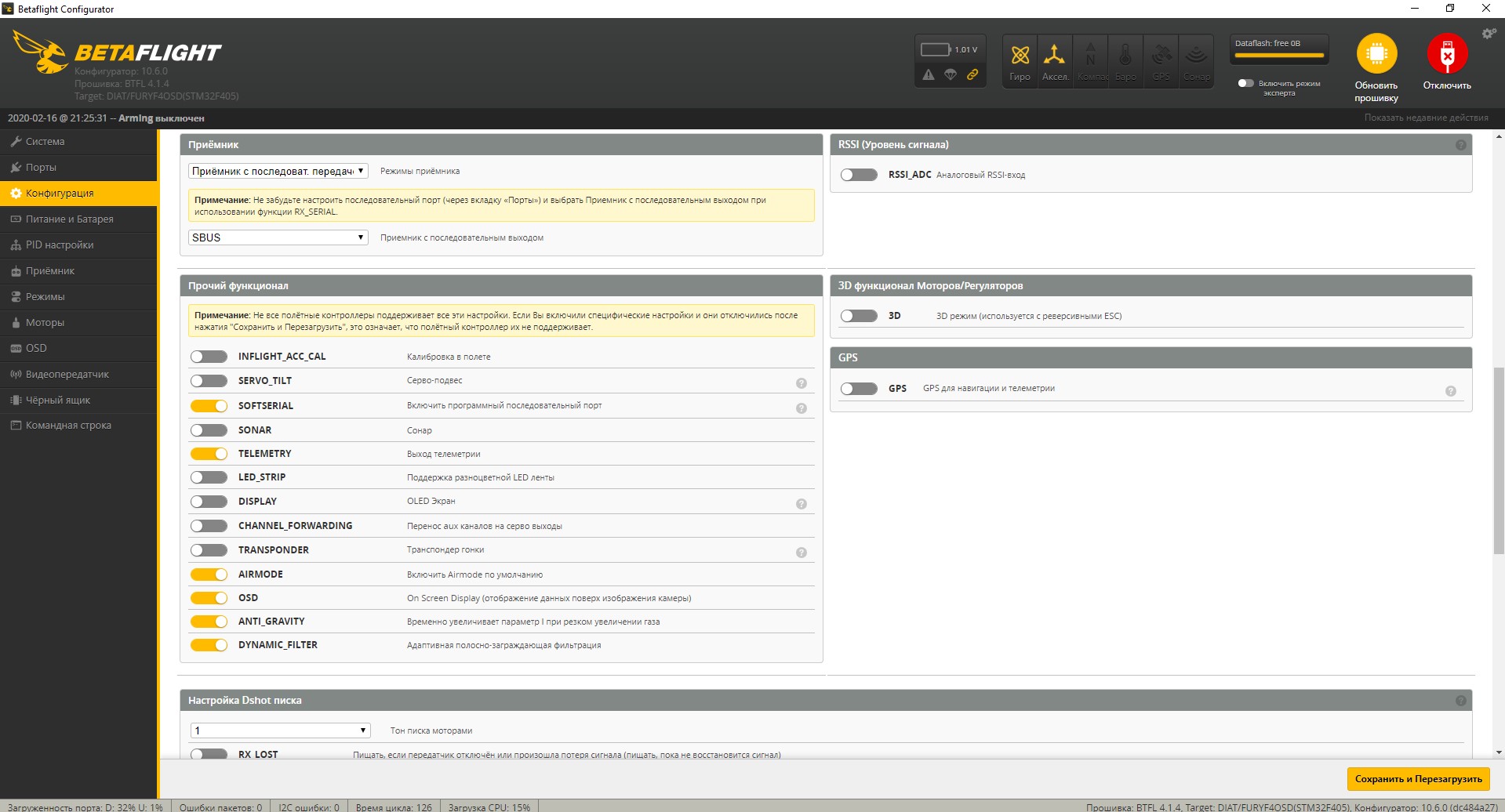
Блок «Приемник»: здесь выбираем строчку «Приемник с последовательной передачей данных«. Ниже выбираем «SBUS«, так как приемник у нас работает на этом протоколе.
Блок «Прочий функционал»: включаем строчки, как на скрине. Если планируете подключить адресную светодиодную ленту, то включаем и LED_STRIP. Остальное включается под индивидуальные задачи и сейчас их включать не требуется.
Жмем «Сохранить и перезагрузить«.
Вкладка Питание и батарея
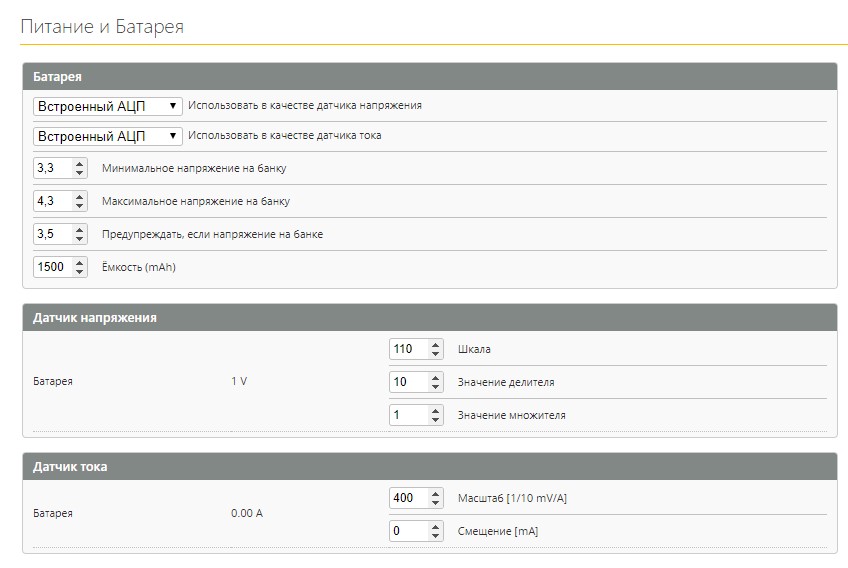
Здесь все стандартно — просто настраиваем характеристики ваших аккумуляторов.
Жмем «Сохранить и перезагрузить«.
Вкладка Приемник
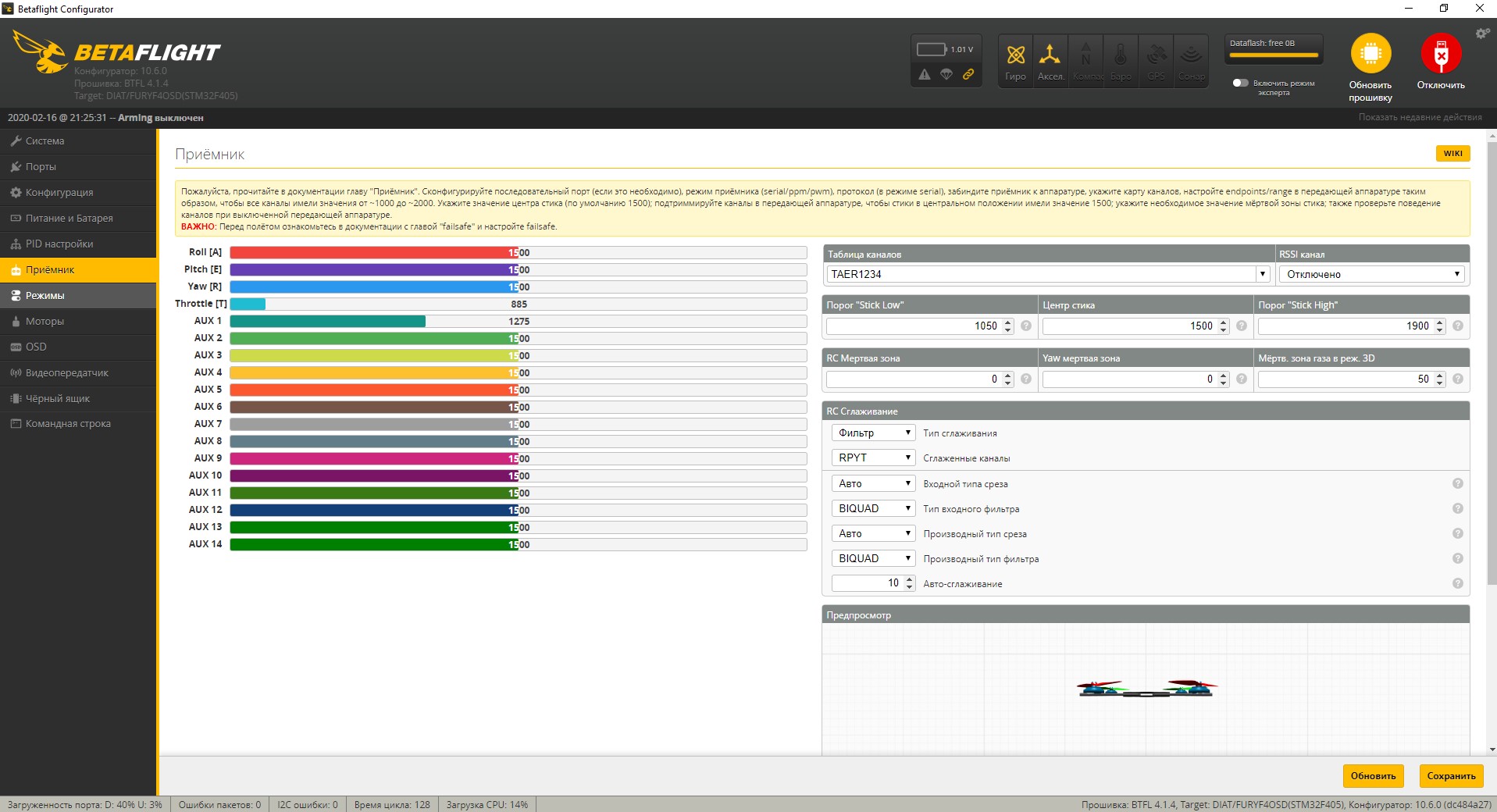
Таблица каналов выбирается и прописывается исходя из таблицы каналов вашей аппаратуры. Данный дрон управляется с помощью аппаратуры управления Taranis QX7 и у него по умолчанию таблица TAER1234. Ее можно менять непосредственно в самой аппаратуре.
Читайте также: Обзор FrSky Taranis QX7
Для проверки, что все работает: подключаем аккумулятор и аппаратуру управления. Двигаем всеми стиками и тумблерами в разные стороны. Разноцветные полоски должны реагировать на каждое движение элементов пульта.
Если вы используете аппаратуру Taranis, то скорее всего у вас тут не будут реагировать тумблеры. Для этого нужно зайти в меню, дойти до MIXER и назначить каналу тумблер. Подробнее, как это сделать на видео ниже:
После этого, у вас начнет отображаться 5 канал в Betaflight и будет реагировать на переключения.
Вкладка Режимы
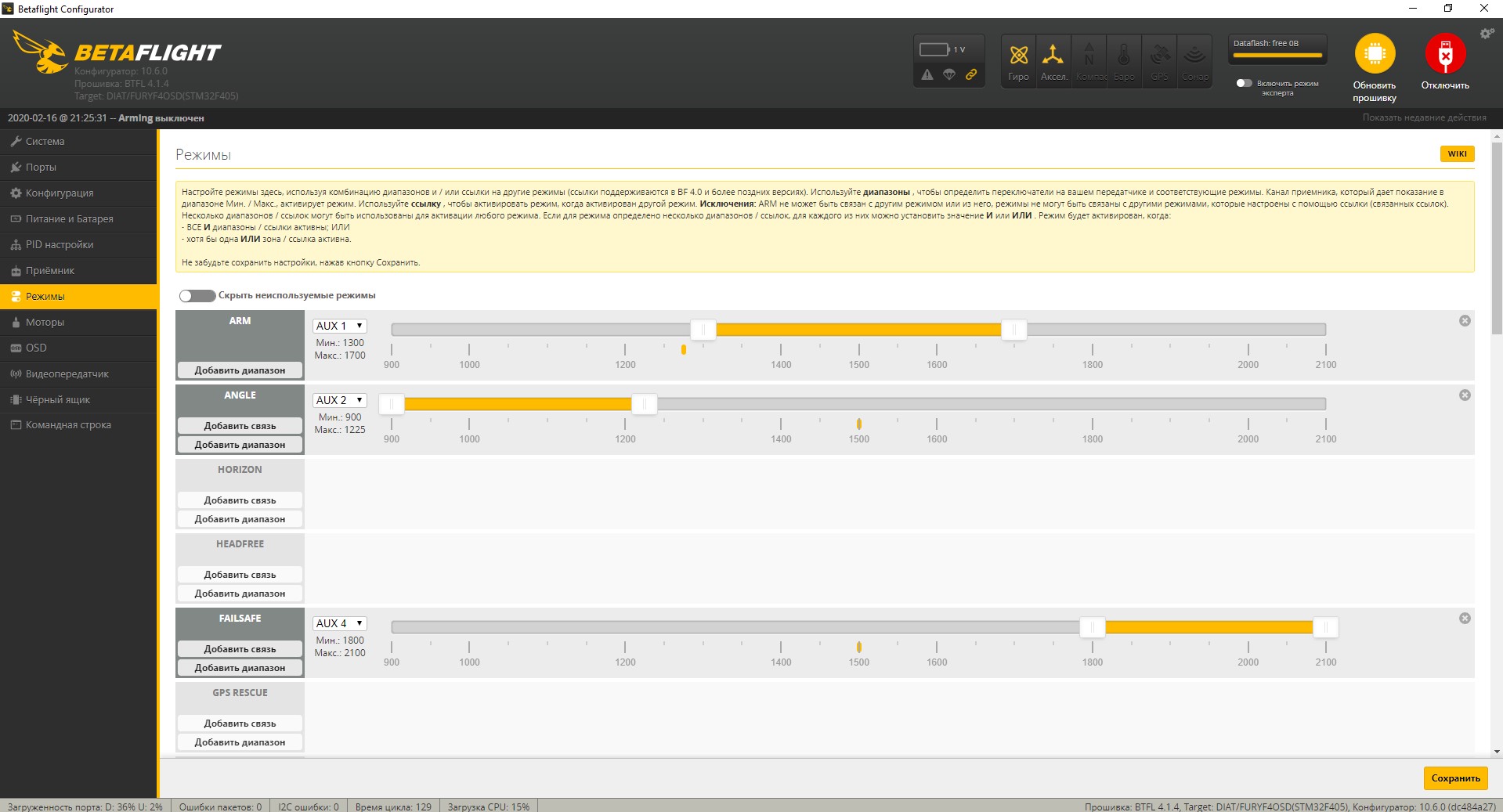
Здесь настраиваются тумблеры на ваше усмотрение. Например, заармить дрон настроено на тумблер 1, а режимы (стабилизация и АКРО) на 2 тумблер. Таким образом, когда включается тумблер 1, сразу включается режим стабилизации:

Жмем «Сохранить«.
Вкладка Моторы
Здесь нам нужно проверить направление моторов. Переключаем тумблер 1 и по очереди поднимаем ползунок каждого двигателя, перед этим подключив аккумулятор и обязательно сняв пропеллеры. Если все хорошо и каждый мотор крутится в свою сторону (как показано на схеме выше), то приступаем к калибровке, если нет, то заходим в BLHeli и меняем направление на Reversed.
При использовании протоколов DSHOT, калибровку делать нет необходимости. Но если вы используете, например, Multishot, то калибровка нужна.
Калибровка:
- Переключаем тумблер 1;
- Отключаем аккумулятор;
- Поднимаем ползунок 2 на самый верх;
- Подключаем аккумулятор — регуляторы пропищат;
- Резко переводим ползунок в нижнее положение — регуляторы снова пропищат;
- Переподключаем аккумулятор.
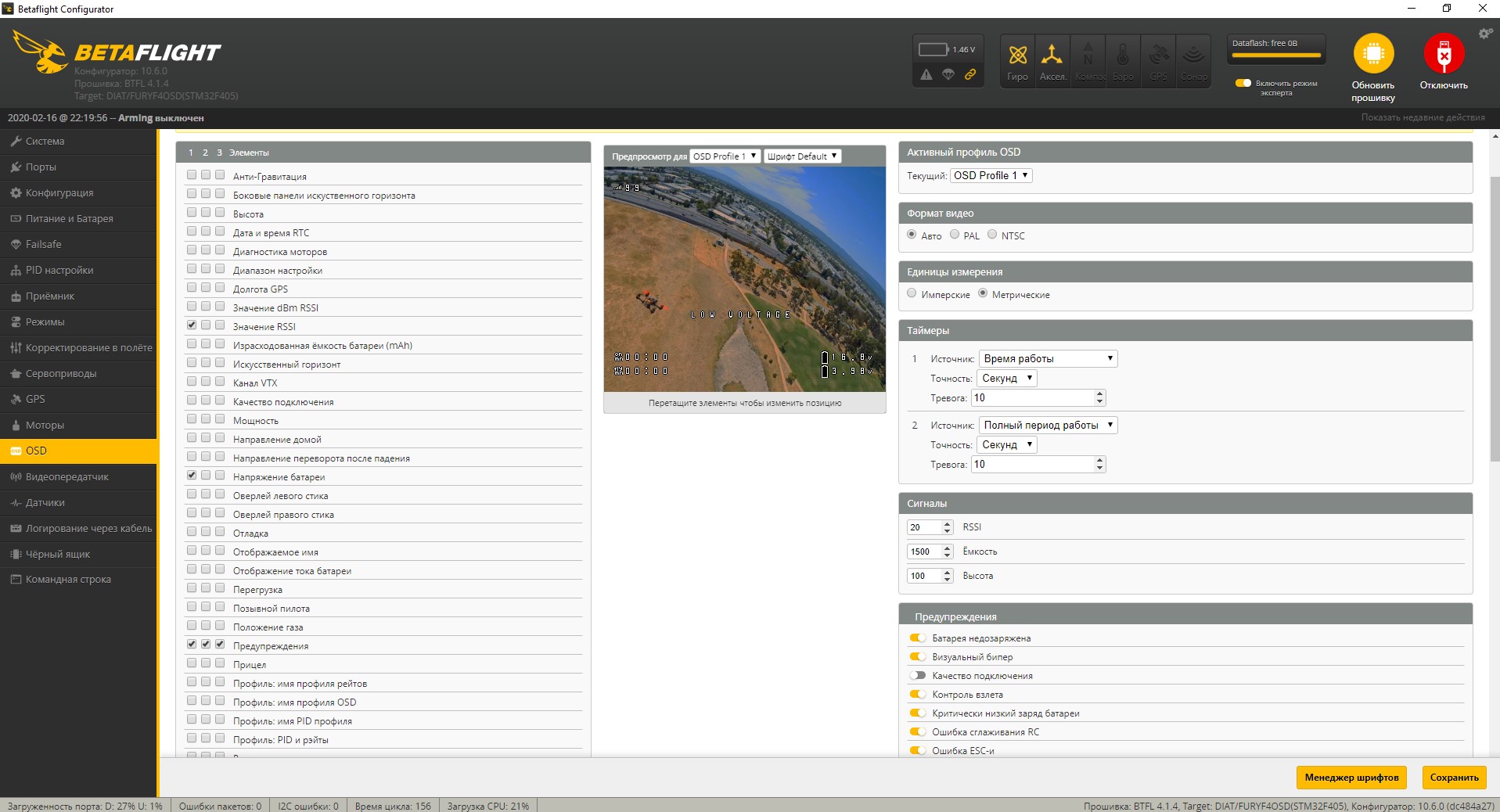
Вкладка OSD
Для этой сборки настроены такие параметры OSD, но вы можете устанавливать любые:
Вкладка Командная строка (CLI)
Здесь сохраняем все наши настройки командой DUMP:
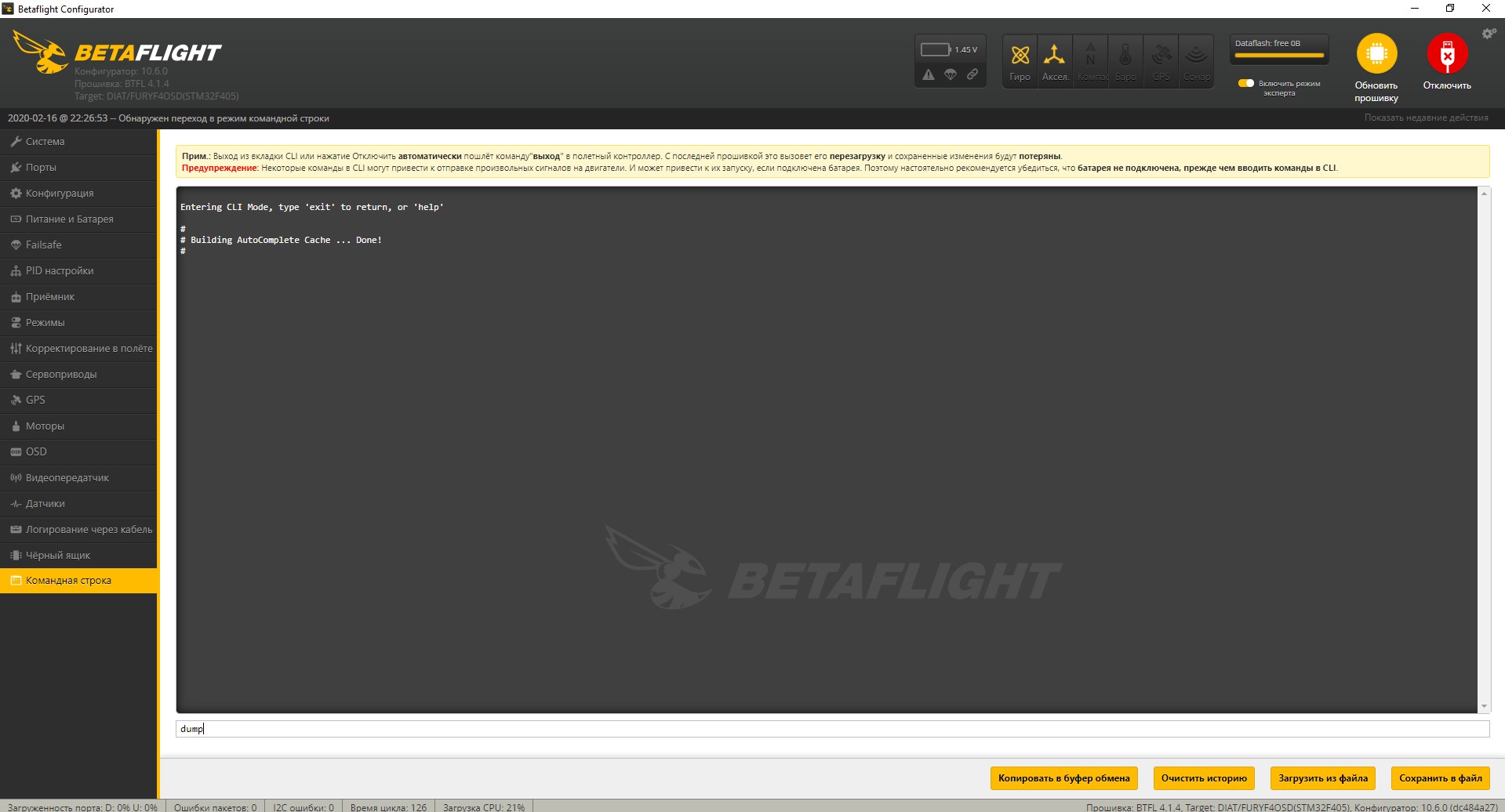

И сохраняем в файл.
Подробнее о командной строке: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Вот и все, ваш квадрокоптер готов к полету!
Фотографии









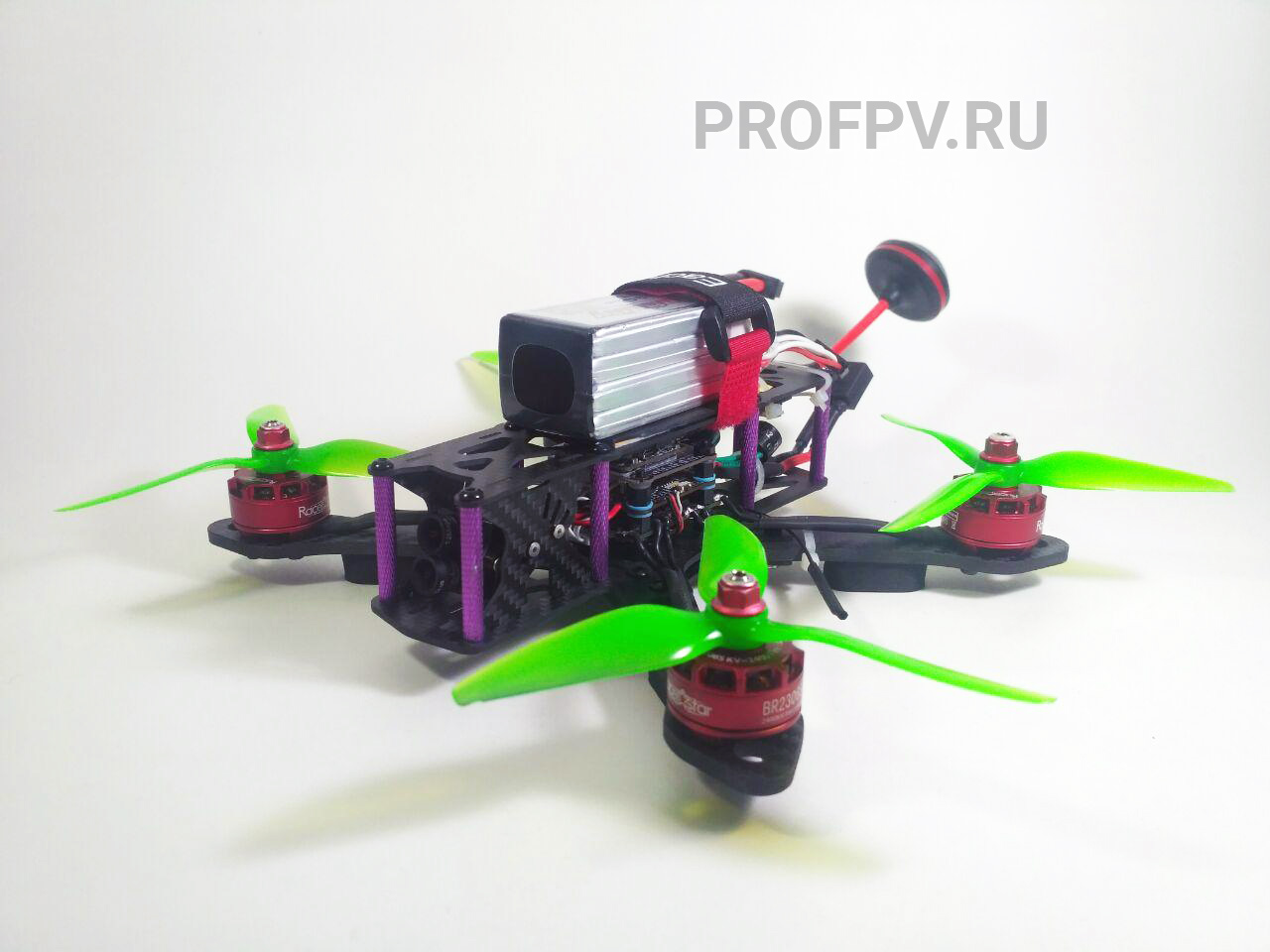





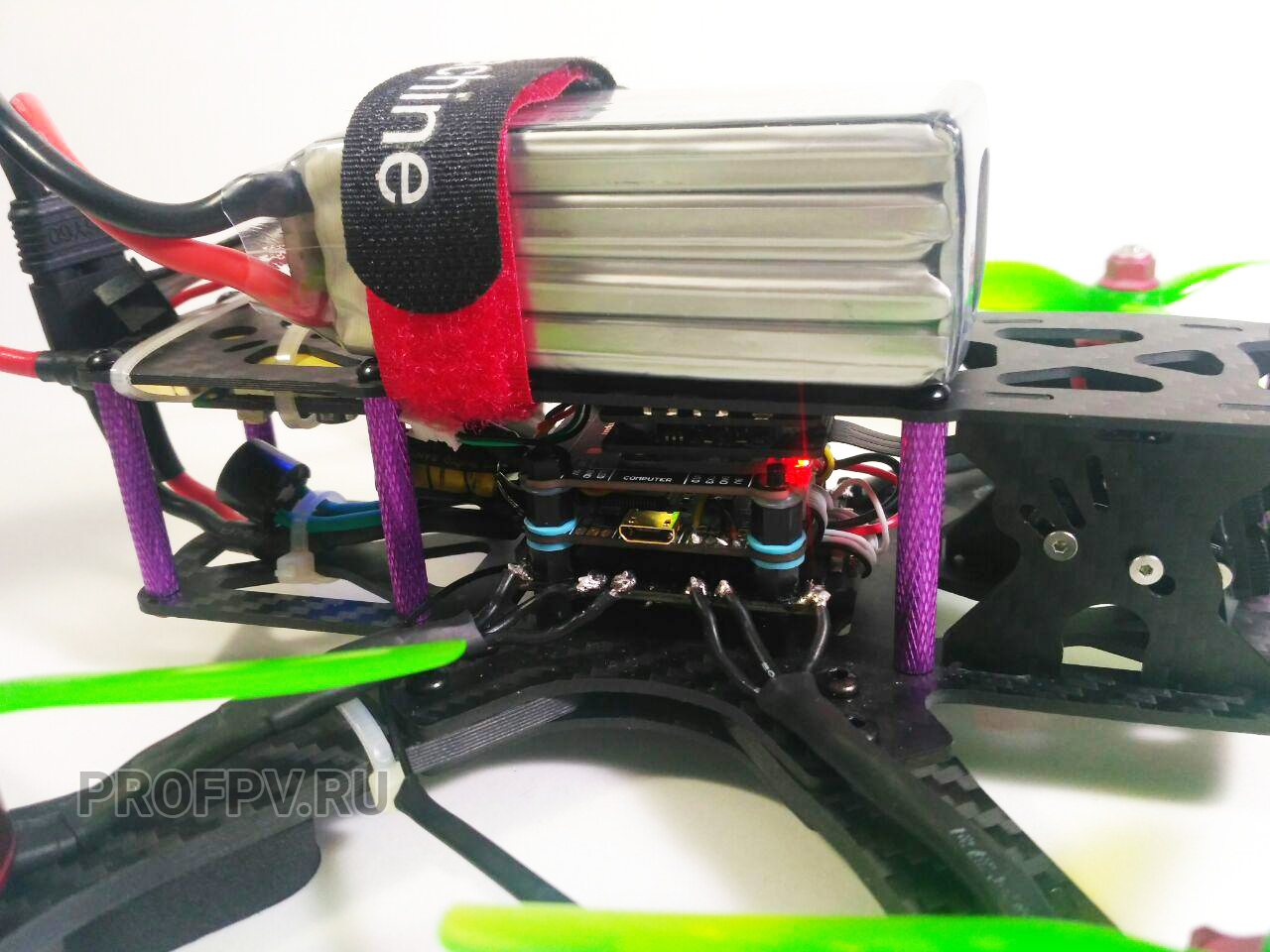
Таблица компонентов и примерная цена
Дешевле и проще заказать компоненты на Яндекс.Маркет*. Все пришло быстро и в срок, без брака.
| Компонент | Название | Ссылка | Цена ~ |
| Рама | Martian 215 | Яндекс.Маркет* | Яндекс.Маркет* | 21.83$ |
| Полетный контроллер с регуляторами оборотов 4 в 1 | MAMBA F405 MK2 | Яндекс.Маркет* | Яндекс.Маркет* | 42$ |
| Моторы | Racerstar 2306 BR2306S Fire Edition 2400KV | Яндекс.Маркет* | Яндекс.Маркет* | 38$/комплект |
| Пропеллеры | HQProp 5045 | Яндекс.Маркет* | Яндекс.Маркет* | 3$ |
| FPV камера | Caddx Tarsier 4K | Яндекс.Маркет* | Яндекс.Маркет* | 90$ |
| Антенна | Foxeer 5.8G Lollipop (RP-SMA Male) | Яндекс.Маркет* | Яндекс.Маркет* | 20$/2 шт. |
| Приемник | Frsky XM+ Plus Micro | Яндекс.Маркет* | Яндекс.Маркет* | 13$ |
| FPV шлем или очки | — | FPV шлем и FPV очки, что это и как работает | |
| Зарядное устройство | — | Как выбрать зарядное устройство LiPo для квадрокоптера? Советы и примеры | |
| Аккумуляторы | AHTECH Infinity 4S 85C (в карточке товара нужно выбрать Цвет: 1500mah 4S 85C) | Яндекс.Маркет* | Яндекс.Маркет* | 25$ |
| Видеопередатчик | Eachine TS5828L (можно использовать любой другой) | Яндекс.Маркет* | Яндекс.Маркет* Альтернатива, с антенной SMA на Яндекс.Маркет* и/или RP-SMA на Ali: | 7-8$ |
| Набор винтов и гаек | Здесь следует выбирать наборы М2! Другие не подойдут. | Яндекс.Маркет* | Яндекс.Маркет* | 7-10$ |
| Переходник с маленькой камеры, на большую | Fixed Mount TPU | Яндекс.Маркет* | Яндекс.Маркет* Ссылка на 3D-модель: ТЫК | 3$ |
| Аппаратура управления | — | Аппаратура управления квадрокоптером, какая бывает и как выбрать | |
| Паяльник | — | Яндекс.Маркет* | Яндекс.Маркет* | 6.53$ |
| Ключ для закручивания гаек пропеллеров | — | Яндекс.Маркет* | Яндекс.Маркет* | 3.89$ |
| Припой 63/37 | Kaina | Яндекс.Маркет* | Яндекс.Маркет* | 2.95$ |
| Оплетка для проводов | — | Яндекс.Маркет* | 1.59$ |
| Пищалка | — | Яндекс.Маркет* | Яндекс.Маркет* | 3$/10 шт. |
| Термоусадка | — | Яндекс.Маркет* | Яндекс.Маркет* | 0.15$/1 метр |
Заключение

Главной целью сборки было, конечно же, прикрутить FPV камеру Caddx Tarsier 4K, ради которой все и затевалось.
Качество видео записывающей камеры отличное. Качество FPV камеры тоже на высоком уровне, также, удивило то, какая хорошая картинка в сумерки, будто с ночным зрением летаешь.
Видео с полетов будет позже.
Если у вас остались вопросы по сборке fpv квадрокоптера: задавайте, с радостью ответим!

Здравствуйте. Какое время полета получилось?
Здравствуйте. Если плавно летать, то до 15мин, если жарить, то 8-10.
Здравствуйте, собираюсь собирать и поражаюсь стоимости в данный момент, скажите пожалуйста может у вас на заметке есть новые более качественные компоненты. И так же хотелось бы узнать про встройку джпс и возврат домой.
Добрый день!
Я начинающий, столкнулся с такой проблемой, залуживаю посадочные места на плате MambaF405MK 2V, начинаю припаивать провода от моторов и провода отваливаются вместе с припоем от платы. Использую лти-120, или жидкую канифоль, проволочный припой с канифолью внутри, температуру выставлял от 220 и до 450, изменений нет. Нанесенный на посадочные места припой, легко пальцами. Подскажите что делать чтобы исправить ситуацию.
Добрый день. Используйте активный флюс, потом промойте ватной палочкой и спиртом.
Спасибо за труд!
Скажите, что-то нужно добавлять, чтобы транслировать видео с камеры на несколько смартфонов по WIFI?
Добрый день! Только окунаюсь в хобби с коптерами. Интересует привязка FPV очков к аппаратуре. нюансы… спасибо.
Добрый день. Процесс как с телевизором аналоговым — включается очки, включается дрон (видеопередатчик), на видеопередатчике выбираете любой канал, на очках выбираете тот же самый. Либо включаете автопоиск на очках и они сами найдут канал. Все)
Доброго времени суток, Сергей. Огромное спасибо за инструкцию. В нашем городе не видно ребят увлекающихся пилотированием дронов По этой причине предлагаю Вам заключить со Мной краудфандинговый контракт. Ваши способности
По этой причине предлагаю Вам заключить со Мной краудфандинговый контракт. Ваши способности  объединить с Моими финансами
объединить с Моими финансами 
С уважением. Алексей
А какая дальность и время полета?
Спасибо за статью! Подскажите, какое сечение силовых проводов питания mamba f405?
Здравствуйте. Спасибо за подробную инфу. Скажите на сегодняшний день комплектующие находятся в актуальном состоянии или надо уже покупать что то другое?
Здравствуйте. Да, все компоненты современные, будут актуальны еще весь этот год точно.
Добрый день, подскажите пожалуйста. я только втягиваюсь. Купил аппаратуру, сейчас пока летаю на симуляторе., хочу собрать дрон, нужна консультация по сборке и выбора комплектующих. Есть вопрос. А вы оказываете услуги за деньги по сборке дрона и настройки его ??
Добрый день. Мы можем и бесплатно подсказать) Спрашивайте на форуме, там удобнее будет.
Собираюсь собрать такой же коптер, только с камерой попроще (буду цеплять GoPro для съемки). Интересует вопрос дальности полёта (дальность нужна не более 2км), какой видеопередатчик сможет без помех дать такую дальность, а также аппаратуру какую лучше взять?
Любой видеопередатчик, с мощностью от 800mW (есть и на 1000 и на 1200mW). По аппаратуре есть статья: https://profpv.ru/apparatura-upravleniya-kvadrokoptero/
Рекомендуем Taranis X9D или Taranis QX7, на 2 км желательно будет использование внешних модулей.
Хорошая статья. Очень хорошая. Только одно «НО»… Итоговая цена компонентов получилась более 277 $ (17,5 т.р.)… Не очень «вкусная» цена за самосборный гоночный коптер?… Вот думаю и «штудирую тырнет»… Не дешевле ли приобрести готовый аппарат?… Спасибо.
Не очень «вкусная» цена за самосборный гоночный коптер?… Вот думаю и «штудирую тырнет»… Не дешевле ли приобрести готовый аппарат?… Спасибо.
Согласен, дорого, но железо тут топовое по сути, можно заменить камеру Tarsier на какую-нибудь FPV RunCam и все станет значительно дешевле. Двигатели тоже можно попроще выбрать
По долларам всего 277$, это просто у нас рубль ниже некуда…
Благодарю за материал. Установка GPS с последующей настройков в BF крайне интересна!
Спасибо вам за труд!
А вам за благодарность!)